- 品牌
- 从宇
- 型号
- CY-GZ
- 加工定制
- 是
工装夹具方案评估时应考虑因素很多,其中有:a.产品功能、结构设计增加防错;b.制造过程中工艺防错。
实施方案在实施方案过程中,要不断根据实际的情况进行调整,并不断地进行改进还完善,实现方案的利益比较大化。
运行和评估收集数据与实施前相比较。
标准化和推广对防错过程进行评审,前面的过程和结果进行总结,建立防错案例数据库,探讨方案能否复制、推广其他类似产品,特别要注意标准化,建立防错数据库,为以后新项目/产品进行防错。 自动化设备需要工装夹具吗?本地工装夹具基础
工装夹具
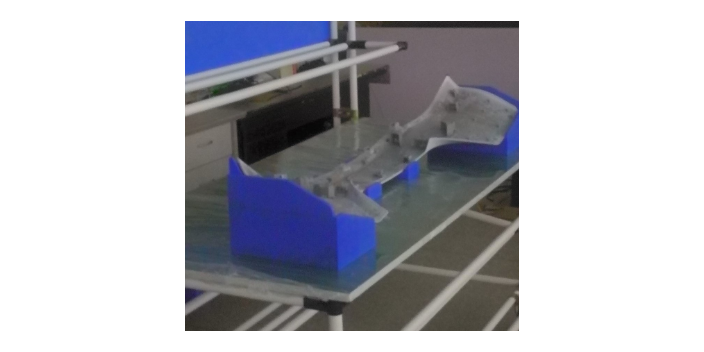
焊装防错焊装防错的工艺开发流程有6个阶段,包括:焊装工艺策划防错、焊装工艺分析防错、焊装工艺设计、焊装设备工装开发,焊装工艺验证、焊装工艺优化及维护。焊装防错工艺开发流程的前4个阶段。焊装工艺开发流程六个阶段防错1.焊装工艺策划防错焊装工艺策划阶段的防错,首先需将防错Checklist导入设计,然后根据类别对零部件进行分类管控,分别采取不同的技术策略。(1)相像(高难度识别):零部件结构相似,局部型面有变化,即使放在一起也难以识别,只能通过检具或三坐标识别;(2)相似(难识别):结构有不同,差异较小,不放在一起无法识别;(3)相近(易错装):零部件虽在结构、大小上有不同,但差异较小,有识别特征,但不明显,不能快速、清晰识别,容易混淆。固定工装夹具加装检测辅助工装可以旋转人工控制旋转?

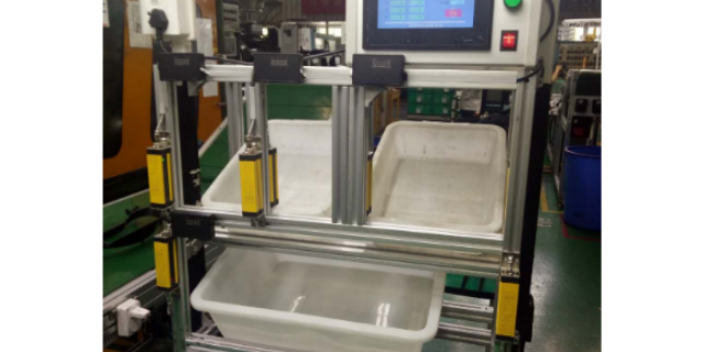
焊接工装。焊接机器人主要适用于批量标准件的生产,在提高生产效率和稳定产品质量方面的优越性较为突出。那么,焊接机器人的工装设计和工装的使用方法是什么呢?1、工装设计(1)工装总体高度要严格控制,原单轴变位机设计时充分考虑了工件旋转时的重心变化,涉及到伺服电动机功率选取。如果工件旋转时偏心严重,会导致伺服电动机过载;(2)工装需要有足够的承重能力,由于工装转台上要安装原有的两轮台车架夹具,所以此工装要有足够的承重能力来承受夹具、两轮台车架以及在变位机旋转过程中的偏心力矩;(3)安全方便的固定,在工件焊接过程中,工装转台不能旋转,必须有安全可靠、方便操作的固定装置
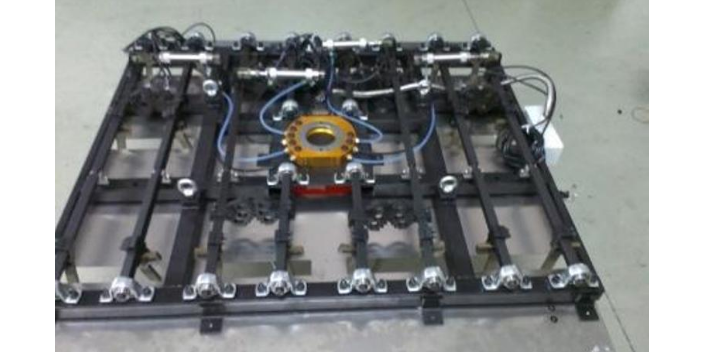
自动化趋势背景下,很多结构工件的焊接加工等工作都利用机器人或者机械臂来完成,车身就同时使用了多个机械臂进行焊装加工,带来的效率提升自然不言而喻。对于企业来说有面临由手工向自动化焊接转型的需要,或者是现有的自动焊接方式不够完善。搬运车车架机器人自动焊接夹具针对问题:目前对搬运车车架的焊接与搬运主要采用手工焊接和人工搬运为主。而现有的手工搬运对于自动化焊接存在诸多不足,已越来越不适应行业的发展,严重影响焊接质量和生产效率。技术方案:车架机器人搬运焊接夹具,采用气动夹紧直线导轨导向方式,产品规格调整时,更换调整搬运夹具中气动插销和气动压板的位置,即可适应工件调整,满足多种规定尺寸内工件焊接的要求 生产工序中有需要工装夹具的地方将产品准确定位!
对于企业来说有面临由手工向自动化焊接转型的需要,或者是现有的自动焊接方式不够完善,搬运车车架机器人自动焊接夹具针对问题:目前对搬运车车架的焊接与搬运主要采用手工焊接和人工搬运为主。而现有的手工搬运对于自动化焊接存在诸多不足,已越来越不适应行业的发展,严重影响焊接质量和生产效率。自动化趋势背景下,很多结构工件的焊接加工等工作都利用机器人或者机械臂来完成,机械臂进行焊装加工,带来的效率提升自然不言而喻。齿轮自动上料机需要工装吗?电动工装夹具配件
有了自动化设备还需要工装吗?本地工装夹具基础
在产品实际的生产过程中,因零件相似而错装、因零件又小又多而漏装等现象时有发生,需要防止或尽可能避免错误发生。一个操作人员每天进行同样的装配工作上百次千次甚至上万次,如果产品设计和过程设计开发不能防止提前预防装配错误的发生,就算是万分之一的概率,操作人员稍微不留神,错误就发生了。因此,必须在产品制造之前,产品及过程设计阶段就要采取防错,进行防错的设计,提前预防装配过程中可能发生的错误,要求为可制造性/可装配性而进行的防错。本地工装夹具基础

- 什么工装夹具私人定做 2024-07-10
- 多功能工装夹具工艺 2024-07-10