- 品牌
- 从宇
- 型号
- CY-GZ
- 加工定制
- 是
在应用装配加工法进行夹具设计制造时,必须熟悉装配加工法制造工艺方面的特点,并在结构设计、尺寸和形位公差标注、夹具元件加工和技术条件制定等各方面适应这一要求。与传统夹具设计相比,用装配加上法制造的夹具在图样设计方面有较大的区别,应有四种设计图样:夹具总装图、夹具导向结构(如钻套、镗套等)装配加工图、夹具导向元件组装前图样(也即半成品图)、夹紧机构和夹具体等产品图。同时使用这四种图样的目的是,为了防止夹具制造部门在夹具制造时,依然采用制成零件、组装元件、调整精度的工艺线路,能对整个夹具制造过程起到相应的指导和制约作用。汽车后视镜生产工装?现代工装夹具怎么样
工装夹具
.焊装工艺设计(1)零部件RPS点设计防错零件RPS设计要在零件模具、检具开发设计之前考虑零件搭接关系,尺寸控制重点部位,合理设计零件定位,避免车身精度受零件转配累计尺寸偏差影响。(2)夹具MCP设计防错夹具MCP设计在夹具开发前期阶段应考虑每个零件定位防错要求。(3)车型布置规划防错焊装产线布置规划要从产线区域布置,考虑零部件的上线防错顺序。4.焊装设备工装开发(1)手工线设备工装防错手工线设备工装防错主要考虑手工夹具防错、零件防错、焊接设备防错。其中夹具定位设计不仅要满足MCP要求,还要满足对相似件差异部位做定位设计。电动工装夹具认真负责智能取料工作台哪里有?
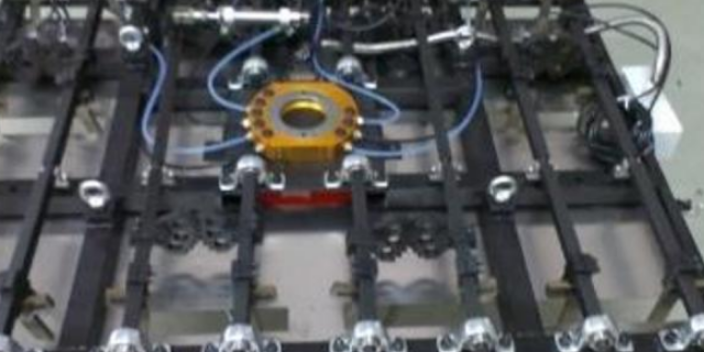
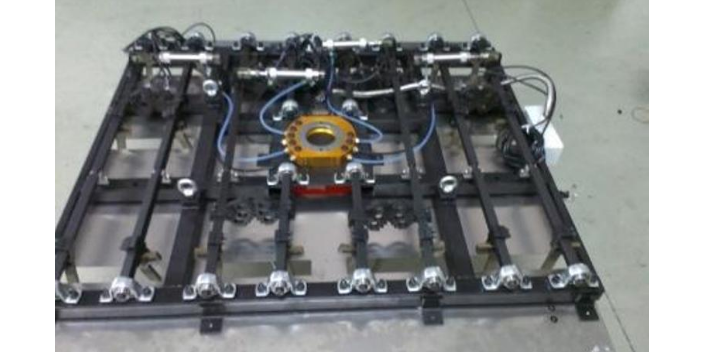
自动化趋势背景下,很多结构工件的焊接加工等工作都利用机器人或者机械臂来完成,车身就同时使用了多个机械臂进行焊装加工,带来的效率提升自然不言而喻。对于企业来说有面临由手工向自动化焊接转型的需要,或者是现有的自动焊接方式不够完善。一、搬运车车架机器人自动焊接夹具针对问题:目前对搬运车车架的焊接与搬运主要采用手工焊接和人工搬运为主。而现有的手工搬运对于自动化焊接存在诸多不足,已越来越不适应行业的发展,严重影响焊接质量和生产效率。技术方案:车架机器人搬运焊接夹具,采用气动夹紧直线导轨导向方式,产品规格调整时,更换调整搬运夹具中气动插销和气动压板的位置,即可适应工件调整,满足多种规定尺寸内工件焊接的要求。
三、工装夹具设计规范化概述1、工装夹具设计的基本方法与步骤设计前的准备工装夹具设计的原始资料包括以下内容:a)设计通知单,零件成品图,毛坯图和工艺路线等技术资料,了解各工序的加工技术要求,定位和夹紧方案,前工序的加工内容,毛坯情况,加工中所使用的机床、刀具、检验量具,加工余量和切削用量等;b)了解生产批量和对夹具的需用情况;c)了解所使用机床的主要技术参数、性能、规格、精度以及与夹具连接部分结构的联系尺寸等;d)夹具的标准料库存情况。2、工装夹具设计考虑的问题夹具设计一般结构单一,给人的感觉结构不是很复杂,尤其现在液压夹具的大行其道,使其原有的机械结构很大简化,但是如果设计过程中不加以详细考虑必然会出现不必要的麻烦:a)被加工件的毛坯余量。造成毛坯尺寸过大,产生干涉。所以在设计之前一定要准备毛坯图。留出足够的空间。b)夹具的排屑畅通性。设计时由于机床的加工空间的有限性,夹具往往被设计的空间比较紧凑,这时往往就会忽略在加工过程产生的铁屑在夹具死角处存积,包括切屑液的流出不畅,给以后加工带来很多麻烦。汽车厂生产组装工装?

回转式气动工装夹具是以回转式工作平台替代直线型流水线生产,相对于传统工装夹具,在加工使用中的主要优点如下。(a)传统加工(b)回转式工作台加工对比发现:(1)在节省空间和设备的前提下,实现了工件流水线的批量化生产,提高了劳动生产率,同时机床主机减少启停次数,降低了刀具损耗率及设备维修率;(2)采用气动气缸装夹,结构简单、轻便安全、安装维护简单,不污染环境及工件,成本低,并且气动元件可靠性高,使用寿命长,输出力以及工作速度的调节非常容易;(3)各工位的气路和电路各自并联,相互单独,降低了制造的难度和安装的精度,也易于更换。小型智能仓储系统哪里有?自动化工装夹具定制价格
电子厂零件组装工装?现代工装夹具怎么样
自动化趋势背景下,很多结构工件的焊接加工等工作都利用机器人或者机械臂来完成,机械臂进行焊装加工,带来的效率提升自然不言而喻。对于企业来说有面临由手工向自动化焊接转型的需要,或者是现有的自动焊接方式不够完善,搬运车车架机器人自动焊接夹具针对问题:目前对搬运车车架的焊接与搬运主要采用手工焊接和人工搬运为主。而现有的手工搬运对于自动化焊接存在诸多不足,已越来越不适应行业的发展,严重影响焊接质量和生产效率。1转接座2.夹具大底板3.气缸4.直线导轨5.气缸推杆6.工件夹紧块技术方案:车架机器人搬运焊接夹具,采用气动夹紧直线导轨导向方式,产品规格调整时,更换调整搬运夹具中气动插销和气动压板的位置,即可适应工件调整,满足多种规定尺寸内工件焊接的要求。现代工装夹具怎么样


- 什么工装夹具私人定做 2024-07-10
- 多功能工装夹具工艺 2024-07-10