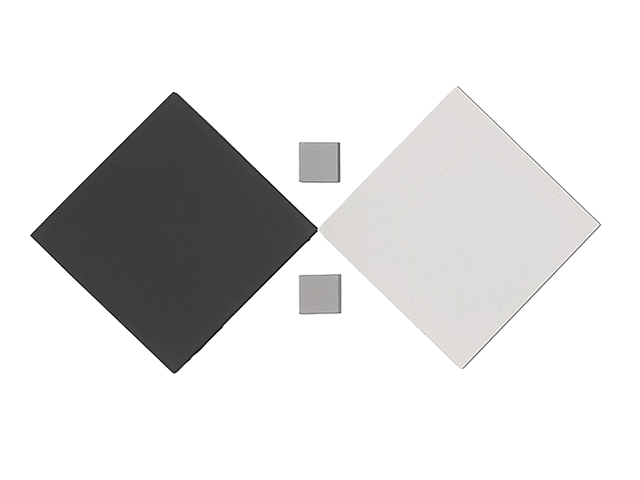
激光雷达标定板的基本使用方法:1、在激光雷达前方一定距离(激光雷达和摄像机都可以捕捉到信息的位置)设置一块反射率标定板(通常采用低中高反射率组合来校准,黑10%+灰50%+白90%),使标定板的板面垂直于地面(建议直接购买带滚轮支架的标定板方便移动),用于承接激光雷达的发射信号;2、在一定距离间选取...
激光雷达定标板基本参数
- 品牌
- 广州瑞科光电
- 型号
- 齐全
- 类型
- 激光雷达定标板
- 规格
- 波长:200-2500nm;反射率:1%-99%
- 加工定制
- 是
- 厂家
- 广州瑞科光电科技有限公司
- 产地
- 广州
激光雷达定标板企业商机
激光雷达定标板的制作方法:在自动驾驶技术中,环境感知系统是基础且至关重要的一环,是自动驾驶汽车性和智能性的保障,环境感知传感器中激光雷达在可靠度、探测范围、测距精度等方面具有的优势。车载激光雷达作为感知周围信息的重要传感器,视场和扫描精度是其重要的参数。对于垂直视场,垂直方向扫描轨迹线的密度越大,扫描分辨率越高,信息越丰富,越有利于自动驾驶决策。采用振镜等扫描方式的激光雷达,其垂直方向扫描轨迹线的密度受限于扫描器件的震动频率。虽然可以通过减小慢轴震动频率来实现提高扫描分辨率,然而慢轴的震动频率与帧频相关,激光雷达帧频存在值要求,因此慢轴震动频率也存在下限值。对于水平视场,现有技术通常会通过在扫描器件前设置光学镜头来放大视场角,或者设置多个激光雷达对其的视场进行拼接。前置镜头组扩大视场角的方式需要较复杂的镜头组,且视场角放大的同时会等比例缩小有效孔径,10%激光雷达定标板,从而降低激光雷达测远能力。多激光雷达拼接的方案会明显增加总成本。激光雷达定标板是用于校准激光雷达测量系统的关键工具。防水耐用激光雷达定标板使用方法

激光雷达(LIDAR)是一种用脉冲激光对目标物反射脉冲返回时间来丈量距离。激光返回时间和波长的不同,可采用数字三维表示法停止制造,目前被普遍称为光学(或光学成像、探测和测距),它是一种光和雷达的混合物。激光雷达,有时被称为三维激光扫描,是三维扫描和激光扫描的特殊组合。随着自动驾驶系统应用的迫切需求,近十年来降生了大量的相机-激光雷达外参自动标定的办法。这些办法依据原理的不同,能够大致分为基于特征的办法、基于运动的办法、基于互信息的办法和基于深度学习的办法。基于特征的办法从相机图像和激光雷达点云中分别提取特征,并依据特征的匹配来终止标定。高准确性激光雷达测试板通过使用激光雷达定标板进行校准,可以提高遥感技术的数据质量和精度。

激光雷达标定板的基本使用方法:1、在激光雷达前方一定距离(激光雷达和摄像机都可以捕捉到信息的位置)设置一块反射率标定板(通常采用低中高反射率组合来校准,黑10%+灰50%+白90%),使标定板的板面垂直于地面(建议直接购买带滚轮支架的标定板方便移动),用于承接激光雷达的发射信号;2、在一定距离间选取n个距离值分别测量角点数据(指车体坐标系下的三维数据),以获取n组数据(需要多次变换标定板位置和角度);3、对激光雷达所采集的数据进行计算并转换,拼接多台激光雷达,即可实现对激光雷达的标定。
激光雷达标定板有哪些优点呢?有怎样的应用?随着高级别自动驾驶功能的落地,大算力芯片、高清摄像头、高精地图已经成为不可缺少的部件。激光雷达可以避免恶劣天气和强光对摄像头的影响,可以进行远距离探测。一般激光雷达的反射率校准是通过用瑞科光电激光雷达标定板来实现。避免除此之外,激光雷达标定板的尺寸、反射率的准确度以及板的材料、喷涂工艺都尤为的重要,瑞科光电激光雷达标定板可以满足这一点,可以根据需求来定制所需要板的尺寸、反射率以及板的波长等严格要求。激光是一种单一颜色、单一波长的光,激光雷达选用的激光波长一般不低于850nm,以避免可见光对人眼的伤害,而目前主流的激光雷达主要有905nm和1550nm两种波长。05nm探测距离受限,采用硅材质,成本较低;1550nm探测距离更远,激光雷达(Lidar)光束范围很窄,所以需要更多的纵向光束,以覆盖大的面积,所以线束决定着画面大小,扫描再通过返回的时间测量距离。激光雷达定标板可以应用于标识测试。

瑞科光电激光雷达定标板应用介绍:激光雷达的性能直接决定了ADAS和无人驾驶系统的性能。激光雷达,简称LiDAR,即光探测与测量,是一种集激光、全球定位系统和IMU三种技术于一身的系统,用于获得数据并生成精确的DEM(数字高程模型)。这三种技术的结合,可以高度准确地定位激光束打在物体上的光斑,测距精度可达厘米级,激光雷达较大的优势就是“准确”和“快速、高效作业”。LiDAR通过测量激光信号的时间差、相位差确定距离,通过水平旋转扫描或相控扫描测角度,并根据这两个数据建立二维的极坐标系;再通过获取不同俯仰角度的信号获得第三维的高度信息。高频激光可在一秒内获取大量(106-107数量级)的位置点信息(称为点云),并根据这些信息进行三维建模。除了获得位置信息外,它还可通过激光信号的反射率初步区分不同材质。激光雷达定标板具有广泛的应用领域,如地形测量、海洋探测和建筑测量等。防水激光测距板使用方法
高精度的激光雷达定标板在地质勘测和地形测量中具有广泛的应用前景。防水耐用激光雷达定标板使用方法
激光雷达标定板无人驾驶定标:激光雷达由发射系统、接纳系统、信息处置三局部组成:激光器将电脉冲变成光脉冲发射进来,光接纳机再把从目的反射回来的光脉冲复原成电脉冲,经过一系列算法来得出目的位置(间隔和角度)、运动状态(速度、振动和姿势)和外形,能够探测、辨认、分辨和跟踪目的。激光雷达由发射系统、接纳系统、信息处置三局部组成:激光器将电脉冲变成光脉冲发射进来,光接纳机再把从目的反射回来的光脉冲复原成电脉冲,经过一系列算法来得出目的位置(间隔和角度)、运动状态(速度、振动和姿势)和外形,能够探测、辨认、分辨和跟踪目的。防水耐用激光雷达定标板使用方法
与激光雷达定标板相关的文章

防水耐用激光雷达定标板使用方法
- 广州相机均匀性测试用激光雷达测试板价钱 2024-07-30
- 广州空间遥感-激光雷达标定板定做 2024-07-28
- 广州模拟靶标用激光测距板优点 2024-07-28
- 广州无人驾驶距离测试用激光测距板价钱 2024-07-27
- 黑白格激光雷达测试板品牌推荐 2024-07-27
- 高稳定性激光雷达定标板批发 2024-07-27
- 广州汽车无人驾驶激光雷达定标板优点 2024-07-26
- 智能机器人-激光雷达标定板销售 2024-07-26
- 低反射率激光雷达定标板生产厂家 2024-07-26
- 广州相机均匀性测试用激光雷达定标板特点 2024-07-25
- 广州环光源均匀性分布测试用激光雷达标定板使用注意事项 2024-07-25
- 黑白格激光测距板品牌推荐 2024-07-25
与激光雷达定标板相关的产品




与激光雷达定标板相关的新闻
-
高反射率激光雷达定标板一站式采购 2024-07-15 00:16:49防水级无人自动智能驾驶激光雷达标定板有哪些优点?激光雷达标定板涂以完美朗伯特性的漫反射材料,具有高稳定性,可用于激光测距和无人驾驶激光雷达的遥感辐射定标。该目的板的典型反射比值从1%-99%不等,是在250-2500nm的波长范围内较常见的朗伯特反射面。由于采用喷涂的工艺,因而能够提供大面积的靶标,...
-
防水激光雷达标定板使用注意事项 2024-07-14 18:06:22ADAS系统自动驾驶感知车载激光雷达定标板应用:智能驾驶技术一般可分为感知、决策、执行三个环节。线控底盘则是高阶层自动驾驶汽车执行环节的载体,线控底盘主要包括线控制动、线控转向、线控悬架、线控油门等系统部件。相较人工驾驶的普通汽车,智能网联汽车技术依赖于感知的输入、计算模型以及道路场景数据,需要通过...
-
防水激光测距板生产厂家 2024-07-14 18:06:15激光雷达定标板于自动驾驶中的应用:随着自动驾驶和软件定义汽车的发展,快速推动智能网联汽车数量增长,使得智能汽车遭受网络攻击的风险日趋增大。智能汽车安全网关是专为智能网联汽车配备的专业车载安全防火墙,为智能汽车提供异构网络的组网方案,并有效抵御网络攻击的威胁。通过摄像头、雷达等精密部件去感知周围环境,...
-
耐用激光测距板品牌 2024-07-13 22:05:09激光雷达定标板的制作方法:在自动驾驶技术中,环境感知系统是基础且至关重要的一环,是自动驾驶汽车性和智能性的保障,环境感知传感器中激光雷达在可靠度、探测范围、测距精度等方面具有的优势。车载激光雷达作为感知周围信息的重要传感器,视场和扫描精度是其重要的参数。对于垂直视场,垂直方向扫描轨迹线的密度越大,扫...
与激光雷达定标板相关的问题
新闻资讯
产品推荐
-
光学实验设备-漫反射板价格
2024-08-30 -

光谱仪系统-漫反射板供应商
2024-08-29 -

广州PTFE漫反射板特点
2024-08-29 -

积分球系统-漫反射板定做
2024-08-29 -
27MM漫反射板定制
2024-08-21 -

积分球系统-漫反射板特点
2024-08-21 -
广州红外光度球品牌
2024-08-20 -

漫反射标准板
2024-08-20 -

广州积分球使用注意事项
2024-08-20