- 品牌
- 孝感岳能电子科技有限公司
- 型号
- 型号齐全
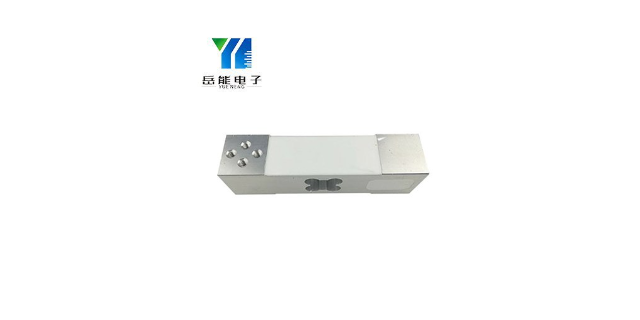
S型拉力传感器的工作原理基于应变测量技术,通过测量传感器内部的应变变化来确定物体的拉力。S型拉力传感器的结构通常由两个平行的金属片组成,它们之间通过一个弯曲的弹性体连接。当物体施加拉力时,传感器内部的弹性体会发生弯曲变形,导致金属片的应变发生变化。这种应变变化可以通过电桥电路进行测量。电桥电路通常由四个电阻组成,其中两个电阻与传感器的金属片相连,另外两个电阻则作为参考电阻。当传感器受到拉力时,金属片的应变会导致电桥电路中的电阻值发生变化,从而引起电桥电路的不平衡。这个不平衡信号可以通过电桥电路的输出端口进行测量。为了测量电桥电路的不平衡信号,通常使用差动放大器进行信号放大和滤波。差动放大器可以将微小的不平衡信号放大到可测量的范围,并且可以抵消噪声和干扰信号。放大后的信号可以通过模数转换器转换为数字信号,然后通过微处理器或其他电子设备进行处理和显示。在电子皮带秤中,S型拉力传感器通常安装在皮带秤的支撑结构上,物体的拉力通过皮带传递到传感器上。传感器测量到的拉力信号可以用于计算物体的重量或质量。通过校准和调整传感器的灵敏度和范围,可以实现高精度和可靠的重量测量。动态称重传感器的精度等级有多种,用户可以根据实际需求选择合适的精度等级。福州单点称重传感器研发
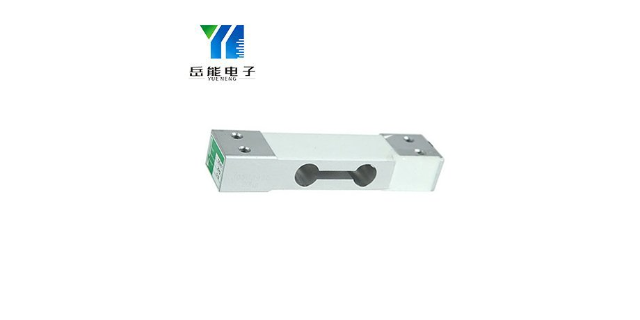
确保称重传感器在长时间运行中的稳定性是非常重要的,因为它直接影响到称重系统的准确性和可靠性。以下是一些确保称重传感器稳定性的方法:1. 选择合适的传感器:在选择称重传感器时,应根据具体应用需求选择合适的传感器类型。不同类型的传感器有不同的特性和适用范围,例如,压阻式传感器、电容式传感器、电子称等。根据具体应用场景和要求,选择适合的传感器类型可以提高稳定性。2. 定期校准:传感器的准确性会随着时间的推移而变化,因此定期校准是确保称重传感器稳定性的关键。校准可以通过与已知质量进行比较来进行,以确定传感器的准确性,并进行必要的调整。校准的频率取决于传感器的使用情况和要求,一般建议每年至少进行一次校准。3. 防止过载:过载是称重传感器损坏和不稳定的主要原因之一。在使用传感器时,应确保不超过其额定负荷范围。如果需要测量较大负荷,可以考虑使用更高负荷能力的传感器或采取其他措施来分散负荷。4. 防止震动和冲击:震动和冲击会对称重传感器的稳定性产生负面影响。因此,在安装传感器时,应尽量避免震动和冲击,可以采取隔振措施或使用防震装置来减少外部干扰。福州单点称重传感器研发随着技术的进步,S型拉力传感器的尺寸越来越小,性能越来越稳定。

S型拉力传感器是一种常用于测量搅拌设备中的拉力的传感器。它可以适应不同的搅拌设备,但需要根据具体的应用场景进行一些调整和适配。首先,要适应不同的搅拌设备,需要选择合适的S型拉力传感器型号和规格。不同的搅拌设备在尺寸、负荷范围和工作环境等方面可能存在差异,因此需要根据实际情况选择合适的传感器。一般来说,S型拉力传感器有多种规格可供选择,包括负荷范围、精度、输出信号等参数,可以根据搅拌设备的需求进行选择。其次,要适应不同的搅拌设备,需要进行传感器的安装和连接。S型拉力传感器通常需要安装在搅拌设备的拉力传递部位,如搅拌轴或搅拌叶片上。安装时需要注意传感器与设备的连接方式和固定方式,确保传感器能够准确地测量拉力,并且能够承受设备产生的力。另外,要适应不同的搅拌设备,需要进行传感器的校准和调试。校准是为了保证传感器输出的信号与实际拉力之间的准确对应关系。校准过程中需要使用已知负荷对传感器进行测试,并根据测试结果进行调整。调试是为了确保传感器能够正常工作,并且输出的信号稳定可靠。调试过程中需要检查传感器的连接是否牢固,信号是否正常,以及是否存在干扰等问题。
S型拉力传感器的工作原理是基于应变测量。当施加拉力时,传感器内部的应变片会发生变形,从而导致电阻值的变化。通过测量电阻值的变化,可以确定施加在传感器上的拉力大小。对于静态拉力的测量,S型拉力传感器非常适用。静态拉力是指施加在物体上的恒定力,不会发生明显的变化。S型拉力传感器可以稳定地测量静态拉力,并提供准确的测量结果。对于动态拉力的测量,S型拉力传感器也可以使用。动态拉力是指施加在物体上的变化力,可能会发生频繁的变化。S型拉力传感器具有较高的响应速度和灵敏度,可以快速捕捉到拉力的变化,并提供准确的测量结果。然而,需要注意的是,对于极端的动态拉力或高频率的拉力变化,S型拉力传感器可能不太适用。在这种情况下,可以考虑使用专门设计用于高频率或极端动态应用的其他类型的拉力传感器。平行称重传感器采用了先进的传感技术,提高了测量效率。
连接S型拉力传感器到数据采集系统需要以下步骤:1. 确定传感器的电气特性:首先,了解S型拉力传感器的电气特性,包括电源电压、输出信号类型(模拟信号还是数字信号)、输出范围等。这些信息通常可以在传感器的技术规格书或说明书中找到。2. 准备数据采集系统:选择一个合适的数据采集系统,确保其能够满足传感器的电气特性要求。数据采集系统通常包括一个数据采集器和相应的软件。确保数据采集器具备足够的输入通道和采样率,以满足实际应用需求。3. 连接传感器到数据采集器:将传感器的输出信号线连接到数据采集器的输入通道。通常,传感器的输出信号线包括电源线、接地线和信号线。电源线连接到数据采集器的电源供应,接地线连接到数据采集器的接地端,信号线连接到数据采集器的输入通道。4. 配置数据采集系统:根据传感器的电气特性,配置数据采集系统的参数。这包括设置输入通道的增益、采样率和滤波器等。确保数据采集系统能够正确解读传感器的输出信号,并将其转换为相应的物理量。S型拉力传感器的设计使其在受到拉力时产生特定的弯曲角度变化。天津称重传感器哪家好
在某些特殊场合,可能需要对动态称重传感器进行防水、防尘等特殊处理。福州单点称重传感器研发
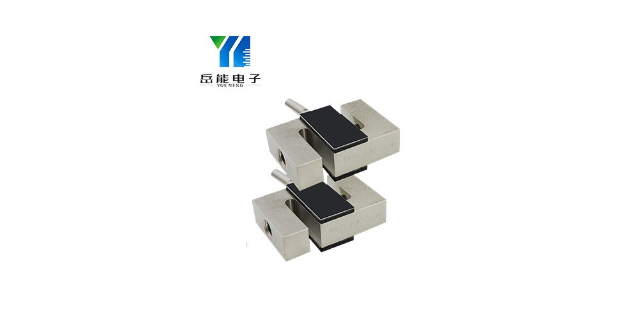
在搅拌设备中,S型拉力传感器可以用于监测混合物的重量。S型拉力传感器是一种常见的力传感器,它可以测量受力物体的拉力。在搅拌设备中,S型拉力传感器通常被安装在搅拌器的支撑结构上,用于测量搅拌器所受到的重力和惯性力。S型拉力传感器的工作原理是基于应变测量。当搅拌器受到重力和惯性力的作用时,传感器的弹性元件会发生微小的形变,这会导致传感器内部的电阻发生变化。通过测量电阻的变化,可以确定受力物体的拉力大小。为了监测混合物的重量,首先需要将搅拌器安装在支撑结构上,并将S型拉力传感器连接到搅拌器和支撑结构之间。当搅拌器开始工作时,传感器会感知到搅拌器所受到的重力和惯性力,并将这些力转化为电信号。接下来,这些电信号可以通过连接到传感器的数据采集系统进行采集和处理。数据采集系统可以将传感器输出的电信号转换为重量值,并显示在监控界面上。通过监控界面,操作人员可以实时了解混合物的重量变化情况。此外,S型拉力传感器还可以与其他传感器和控制系统进行集成,以实现更复杂的搅拌过程控制。例如,可以将S型拉力传感器的输出信号与搅拌器的转速传感器和温度传感器的信号进行综合分析,从而实现对混合物的精确控制。福州单点称重传感器研发
- 郑州20kg称重传感器定制 2024-06-03
- 郑州皮带秤测力称重传感器定制 2024-06-02
- 贵阳称重传感器 2024-06-01
- 郑州高精度称重传感器开发 2024-05-31
- 南昌单点称重传感器设计 2024-05-30
- 武汉S型拉力称重传感器销售 2024-05-30
- 贵阳铝制称重传感器定制 2024-05-30
- 沈阳料斗秤测力称重传感器销售 2024-05-30
- 武汉反应釜配料称重传感器厂家 2024-05-29
- 长沙皮带秤测力称重传感器生产 2024-05-29
- 西宁抗震称重传感器哪家好 2024-05-27
- 吊钩秤测力称重传感器研发 2024-05-26