- 品牌
- 汇像
- 型号
- MR6
- 重量
- 105KG
- 产地
- 上海
- 厂家
- 汇像
- 臂展
- 625mm
- 重复定位精度
- +/-0.05mm
- 负载
- 3kg
- 平均功率
- 150W
- 工具速度
- 1500mm/s
- 末端工具
- 力控抓手:支持距离 力矩双模式控制, 夹持力0-140N
- 导航方式
- 双激光雷达SLAM
- 综合续航
- 10h
- 尺寸(长*宽*高)
- 800mm*560mm*600mm
- 驱动形式
- 双轮差速
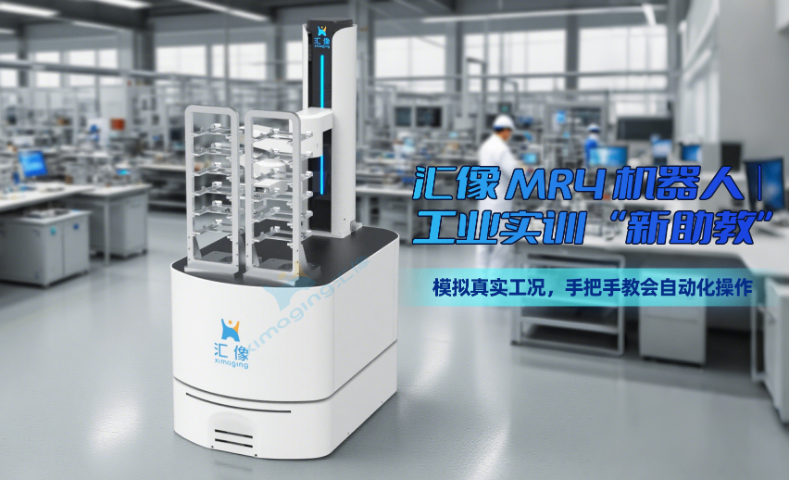
面对实验室 “跨楼层” 与 “无人洁净区” 的特殊需求,汇像移动机器人展现出强大的场景适配性。依托智能交互系统和腕部摄像头,机器人可自主识别电梯、走廊等跨楼层通行路径,准确规划移动路线,无需人工引导即可完成不同楼层间的样本、试剂转运任务,解决跨区域作业难题。在无人洁净区,机器人无需人工干预,凭借 +/-0.05mm 的重复定位精度,能在严苛洁净环境下稳定执行高精度操作,避免人员进入破坏洁净度;625mm 的臂展可覆盖洁净区内的实验工位,3kg 负载轻松搬运洁净耗材,全程保持操作规范性,满足无人洁净区对自动化、低污染的作业要求,提升洁净区实验效率。汇像 HelenX-MR4实验室新助力。沈阳人工智能移动机器人机械臂
汇像科技移动机器人 的智能语音交互系统,为水质分析全自动化实验室的高效运转注入新动能。其配备的远场麦克风阵列与环形 6 麦阵列,可实现 360° 声源定位,即便实验室环境中存在检测设备运行噪音,也能准确捕捉实验人员的语音指令。当需要临时调整高锰酸钾指数等指标的检测顺序,或补充特定水样检测任务时,工作人员无需靠近控制台,通过 “语音召唤” 即可唤醒机器人,口头下达任务指令,机器人快速响应并同步更新检测流程。这种便捷的交互方式,打破了传统自动化实验室对固定操作端的依赖,实现人与机器人的实时协同,大幅提升水质检测流程的灵活性与应急处理效率。芜湖6轴移动机器人价格汇像移动机器人辅助食品安全检测。

汇像移动机器人解决实验室空间狭窄与改造难题?针对实验室 “空间有限、设备摆放无规律、改造难度大” 的痛点,汇像移动式机器人凭借技术优势提供高效解决方案。其搭载的激光导航系统,配合紧凑机身设计,需较小空间就能灵活穿梭,轻松应对拥挤的实验区域;无需复杂场地改造,只需提前部署好点位,机器人便能识别并定位各类无规律摆放的实验设备,大幅降低改造成本与周期。同时,机器人臂展达 625mm,可覆盖多数实验设备的操作范围,搭配 +/-0.05mm 的超高重复定位精度,即便在设备密集的有限空间内,也能准确完成样本抓取、试剂传递等操作,3kg 的负载能力足以承载常见实验耗材,既适配复杂场地环境,又保障实验操作的准确高效。
“人工智能+”助力消费提质,培育产品消费新业态。推动智能终端“万物智联”,培育智能产品生态,大力发展智能网联汽车、人工智能手机和电脑、智能机器人、智能家居、智能穿戴等新一代智能终端,打造一体化全场景覆盖的智能交互环境。加快人工智能与元宇宙、低空飞行、增材制造、脑机接口等技术融合和产品创新,探索智能产品新形态。推动人工智能普惠共享。把人工智能作为造福人类的产品,深化人工智能领域高水平开放,推动人工智能技术开源可及,强化算力、数据、人才等领域国际合作,帮助全球南方国家加强人工智能能力建设,助力各国平等参与智能化发展进程,弥合全球智能鸿沟。 汇像 HelenX-MR6 移动机器人驱动实验室发展。

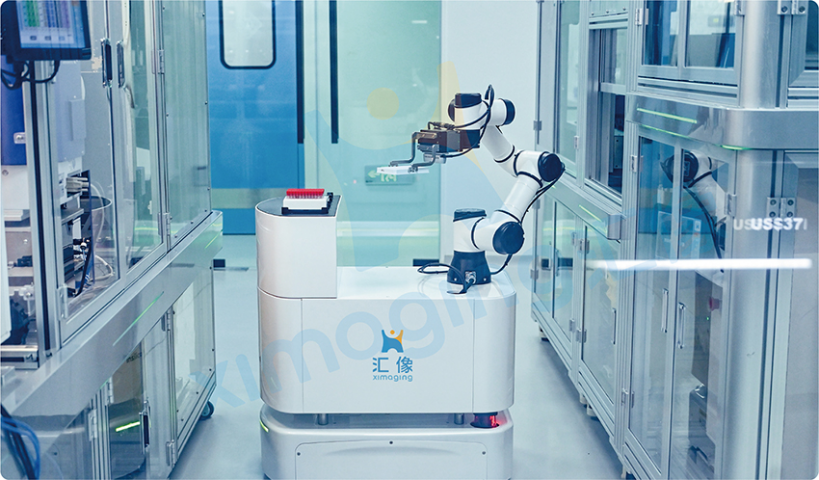
汇像科技移动机器人运用一体化控制技术,该机器人可以在布局紧凑、通道狭窄的实验室准确运行、灵活移动,多车一致性高,重复到点精度可以达到 ±0.05mm,具备一些明显优势如自动完成实验,减少重复劳动,聚焦实验设计与分析标准化实验操作,减少人为误差,提升重复性数据化实验过程和结果,支持溯源分析,支持AI赋能创新。无论是实验室样本的传递还是设备间的协作,该移动机器人都能做到无干扰、高精度的操作,一定程度提升了实验操作的流畅性和安全性。汇像移动机器人:自动化实验室教研新动能。南京AGV移动机器人
汇像移动机器人生命科学实验有效运转助力。沈阳人工智能移动机器人机械臂
汇像科技公司致力于成为生命健康自动化・智能化解决方案提供商,让世界每一个人都享受健康安全品质的生活。其LOGO含义是希望把汇像做成一家对员工、对客户都有温度的企业。其自研移动式机器人。如HelenX-MR4是可在布局紧凑、通道狭窄的实验室精细运行、灵活移动,臂展可达625mm,重复定位精度:+/-0.05mm其具备碰撞保护、智能避障功能,可满足复杂的人机协作场景,还拥有大屏、语音、人脸识别等智能交互功能。此外,该系列机器人的硬件抓手工具包力控抓手 + 支持距离力矩双模式控制,平台负载:150kg,抓手内置高识读性能的扫码器,且带力矩感应。沈阳人工智能移动机器人机械臂
作为入选国家专精特新“小巨人”企业名录的创新先锋,汇像科技充分受益于国家鼓励关键技术攻关的强力政策支持,特别是享有研发费用高达175%的加计扣除税收优惠政策。这一实质性利好大力降低了企业的创新成本,为其持续投入高精尖研发提供了强劲动力。汇像科HelenX系列移动式机器人以iMagicOSLite为关键,可灵活整合不同科学实验仪器,兼容各类三方设备,能完成从试剂耗材存储到数据存储的全流程自动化操作,可准确地抓取和操作微小样本,在医疗检测、科研实验等对精度要求极高的领域具有强大优势。iMagicOS智慧操作系统平台可通过AI算法自动解析设备、方法、参数,并生成控制系统可识别的任务流程图,功...
- 大连4轴移动机器人 2025-12-27
- 实验室移动机器人 2025-12-27
- 重庆AGV移动机器人厂商 2025-12-26
- 乌鲁木齐自主移动机器人设备 2025-12-26
- 济南AGV移动机器人公司 2025-12-26
- 重庆移动机器人价格 2025-12-26
- 嘉兴复合移动机器人设备 2025-12-26
- 常州6轴移动机器人夹爪 2025-12-26
- 淄博移动机器人价格 2025-12-25
- 广州国产移动机器人厂商 2025-12-25



- 合肥医疗移动机器人机械臂 2025-12-24
- 自主移动机器人amr 2025-12-24
- 无锡移动机器人夹爪 2025-12-24
- 成都移动机器人公司 2025-12-23
- 太原实验室移动机器人厂商 2025-12-23
- 北京人工智能移动机器人厂商 2025-12-23


- 北京五轴机械手品牌 12-27
- 实验室移动机器人 12-27
- 上海实验室机械手厂家 12-27
- 重庆AGV移动机器人厂商 12-26
- 乌鲁木齐自主移动机器人设备 12-26
- 济南AGV移动机器人公司 12-26
- 东莞七轴机械手系统 12-26
- 杭州移动式机械手 12-26
- 重庆移动机器人价格 12-26
- 嘉兴复合移动机器人设备 12-26