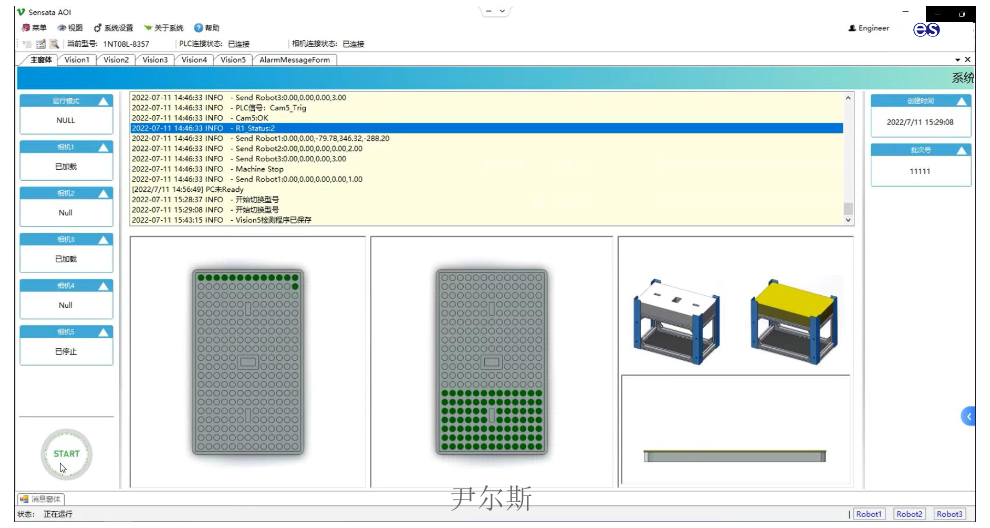
基于表面贴装元器件(Surface Mount Device,SMD)逐片检测工况中对拾取、放回料带的定位需求,提出一种适于多自由度(Multi-Degrees Of Freedom,MDOF)精确转移的视觉定位方法。针对SMD逐片检测流程和布局分析,计算了元件成功放回料槽的转移误差允许边界;分别提...
视觉定位基本参数
- 品牌
- 尹尔斯
- 型号
- 尹尔斯
- 料斗类型
- 筒形料斗,等分线料斗,螺旋料斗,锥形料斗,线料斗
- 底盘类型
- 正拉底盘,压电式底盘,侧拉底盘,精密底盘
- 控制器类型
- 普通控制器,分极控制器,带缓启动控制器,调频控制器,数显调频控制器
视觉定位企业商机
视觉定位主要通过相机视觉信息与环境视觉特征的匹配实现位置计算。然而视觉匹配计算量较大,难以支持室内连续定位。对于视觉数据稀疏的环境,单纯依靠视觉匹配也难以实现连续的轨迹定位。针对这一问题,本文提出一种结合感知哈希与空间约束的室内连续视觉定位方法,通过智能手机采集的连续视频帧与室内图像数据集的匹配,实现精确的视觉定位。为改进视觉匹配效率,构建了一种双层次的匹配图像搜索策略,包括基于感知哈希方法的全局搜索策略和顾及运动连续性的局部搜索策略。在此基础上,设计了一种室内连续视觉定位算法,结合视觉匹配与航位推算提高视觉定位的空间连续性,并利用运动恢复结构方法提高航向角估计精度。试验结果表明,本文方法在图像匹配定位、连续离线定位、连续在线定位模式下的平均定位误差分别为0.70、0.86和0.93m,能够达到亚米级定位精度。视觉定位适用什么领域。云南自动视觉定位推荐厂家
视觉定位方案因为易于部署、造价便宜,且不存在无线信号屏蔽问题,目前已成为无人机室内定位与导航领域的研发热点。论文在详细介绍无人机双目视觉定位算法的基础上,选用Pixhawk飞控板、ODROID XU4 ARM板、mvBlueFOX-MLC摄像头和四旋翼机架等,实际搭建了无人机双目视觉定位测试系统,以SIFT算法作为特征点提取和匹配的主要方法,实现无人机的双目视觉室内定位功能,进而对室内导航飞行任务进行了部署与测试。从室内导航飞行的测试结果可以发现,视觉定位中的累积误差明显制约了飞行效果。针对这一问题,本文结合无人机应用中常见的室内巡航场景,提出了一种基于历史访问信息的视觉定位累积误差抑制方法。山西自动视觉定位费用视觉定位的优势来自于哪里。

针对机器人贴标系统对圆钢端面中心X、Y坐标与Z坐标测量精度要求的不同,提出了主辅眼视觉定位方法。设置主相机与辅相机,采用小二乘法识别圆钢端面并拟合圆,主相机运用三角形内插值法标定求出较为精确的X、Y坐标,主、辅相机组成双目视觉系统运用张正友标定法进行二次标定获得主辅相机的内外参,通过形心匹配求视差值,再利用三角测距原理求出Z坐标。实验结果表明,主辅眼视觉定位方法求取的圆钢端面中心的X、Y坐标精度可达到±1mm以内,Z坐标精度可达到±5mm以内,能够满足圆钢端面机器人自动贴标的位置精度要求。
从工业机器人的视觉定位问题出发,通过深入研究视觉定位技术的成果,提出了一种基于模板匹配的计算机视觉定位技术的软件设计方法,归纳出模板匹配定位、位姿计算的软件求解方法。在图像预处理环节,采用均值滤波的改进算法、分段线性变换的对比度增强算法以及Canny边缘检测的改进算子;为了提高边缘检测的效果,弥补现有边缘检测算子对弱边缘检测的不足,又提出了采用分段累积搜索算子进行弱边缘的跟踪和连接;通过对现今各模板匹配方法的深入研究,提出了基于图像金字塔结构的Hausdorff距离匹配的改进算法,在构建图像金字塔的同时加入带旋转的模板匹配;,通过仿射变换和坐标系变换计算出目标物在世界坐标系下的空间坐标,从而引导工业机器人自主完成目标物的准确抓取。 给出了视觉定位系统的软件设计方法,分析了系统功能模块的结构关系,开发了基于计算机视觉定位技术的软件系统,实现了基于模板匹配的目标物位置和角度的精确计算。工业现场的大量实验表明,该系统可以快速准确的实现场景内目标物的抓取任务,具有很好的稳定性、实用性,兼具理论意义和应用价值。工业机器人视觉定位。
工业机器人作为现产制造领域重要的自动化装备,已被广泛应用于搬运、喷涂、焊接、装配等生产任务中。随着现产对机器人智能性和自主性要求的提高,工业机器人智能化应用已经成为当下机器人技术的研究热点。零件装配是生产过程中常见且重要的生产任务,研究一种适用于柔性生产单元轴孔自动化装配过程中的目标识别和视觉定位方法对提高工业机器人的智能化应用水平和生产效率等方面具有重要意义。因此,本文以一台六轴串联关节型工业机器人为研究对象,搭建了工业机器人目标识别和视觉定位实验平台,对工业机器人轴孔自动化装配过程中的视觉定位和自动控制问题进行了深入探讨。国内视觉定位机器人哪家强。河南比较好的视觉定位推荐厂家
视觉定位机器人组装清单。云南自动视觉定位推荐厂家
机器视觉在生产制造中主要用在视觉定位,尺寸测量,产品检测,物体识别等几个领域。在这几个领域中,一个基本的算法就是产品识别和定位,比如视觉定位机器人,要在图像中识别出要抓取的产品,并定位出坐标,才引导机器人到指定的产品位置。尺寸测量,产品检测等也是一样的,在测量和检测之前,首先要知道有没有产品,产品的位置在哪里,才可以应用后续的各种分析工具。因此,产品识别和定位是一个基本问题。如果要设计一个可行的产品识别和定位的算法,需要克服几方面的困难。云南自动视觉定位推荐厂家
与视觉定位相关的文章
安徽加工视觉定位
- 辽宁哪里有视觉定位报价 2023-11-03
- 陕西本地视觉定位优势 2023-11-03
- 西藏购买视觉定位推荐厂家 2023-11-02
- 黑龙江视觉定位报价 2023-11-02
- 山西自动视觉定位生产厂家 2023-11-01
- 广西自动化视觉定位参考价格 2023-11-01
- 四川小型视觉定位市场价 2023-10-31
- 辽宁本地视觉定位参考价格 2023-10-31
- 贵州比较好的视觉定位优势 2023-10-30
- 黑龙江办公用视觉定位功率 2023-10-30
- 福建微型视觉定位报价行情 2023-10-28
- 北京智能视觉定位能耗制动 2023-10-28
与视觉定位相关的产品
与视觉定位相关的新闻
-
江西比较好的视觉定位费用 2023-10-25 00:21:21工业机器人作为现产制造领域重要的自动化装备,已被广泛应用于搬运、喷涂、焊接、装配等生产任务中。随着现产对机器人智能性和自主性要求的提高,工业机器人智能化应用已经成为当下机器人技术的研究热点。零件装配是生产过程中常见且重要的生产任务,研究一种适用于柔性生产单元轴孔自动化装配过程中的目标识别和视觉定位方...
-
辽宁加工视觉定位能耗制动 2023-10-25 00:21:21基于表面贴装元器件(Surface Mount Device,SMD)逐片检测工况中对拾取、放回料带的定位需求,提出一种适于多自由度(Multi-Degrees Of Freedom,MDOF)精确转移的视觉定位方法。针对SMD逐片检测流程和布局分析,计算了元件成功放回料槽的转移误差允许边界;分别提...
-
青海智能视觉定位报价行情 2023-10-24 00:19:14众所周知,工业机器人是制造业的制造设备,对于稳定性、定位精细度的要求,是非常高的,因此,需要借助机器视觉定位技术处理图像,通过工业相机实现引导定位和模式识别等操作,得快速获取物体的质心和边界,才能满足工业机器人系统运行的自定位需求,缩短其期望位置和末端位置间的差距,进而才能促进机器视觉定位技术的创新...
-
广东多功能视觉定位参考价格 2023-10-24 05:08:40随着“中国制造2025”的到来,工业生产的智能化、定制化程度不断加强,特别是以工业机器人为主体的产线,在机器视觉的赋能下,针对工业生产中多领域、多场景、多样化等需求,将展现出强大的能量。机器视觉定位技术与工业机器人的结合具有视觉处理速度快、定位精度高以及通用性强等多种优点,广泛应用于装配、码垛、焊接...
与视觉定位相关的问题
新闻资讯
产品推荐
-

辽宁微型自动上下料生产厂家
2023-11-11 -
广东比较好的激光打标要多少钱
2023-11-10 -
河南微型激光打标价格表格
2023-11-10 -
重庆比较好的柔性振动盘优势
2023-11-09 -
安徽激光打标要多少钱
2023-11-09 -

辽宁自动激光打标报价
2023-11-08 -

河北品质柔性振动盘费用
2023-11-08 -
北京智能自动上下料报价
2023-11-07 -
青海微型柔性振动盘生产厂家
2023-11-07