使用CCTV管道检测,减少了工人下井作业的危险性。人员可一直在安全的位置远程操控机器人,即可根据机器人拍摄的影像资料,对管道内部存在的问题进行详细的位置确定、缺陷性质的判断。2、CCTV管道检测是采用内窥闭路电视检测系统,安装在管道机器人上,实现在管道内控制爬行,对管道内部进行摄影检测,如腐蚀、穿孔...
管道检测与评估基本参数
- 品牌
- 江苏振祺建设
管道检测与评估企业商机
管道检测修复主要包含以下两个方面:1、功能性检测:管道检测修复的排水管道功能性检测主要是以检查管道排水功能为目的的检测,一般检测管道的有效过水断面,并将管道实际过流量与设计流量进行比较,以确定管道的功能性状况。2、结构性检测:管道检测修复的排水管道结构性检测主要是以检查管道材料结构现状为目的的检测,这类检测主要了解管道的结构现状以及连接状况,通过综合评估后确定管道给地下水资源及市政设施是否带来影响。对于这类结构性问题被检测出来后一般需要通过管道检测修复的手段来解决。综上所述,就是管道检测修复主要包含的两个方面。但是由于情况不同,我们在进行管道检测修复地的过程中,应根据具体来具体分析,从而才能更加准确而经济地确定管道损坏的位置和程度,为制定管道维修计划提供参考,以便采用不同的修复方法,及时、经济地进行修复。声呐是通过声纳头发射声纳波以水为介质碰到管壁反射后成像,形成管道断面扫描图。三明雨水管道检测与评估是什么

管道机器人是现代化的一款管道检查设备,因为其做工精密,工艺复杂,价格也高,所以为了保证机器人自身的设备安全,以及对检测结果的精细度保证,我们在使用管道机器人下管道进行巡查作业时,对地下管道的作业环境就有相应的客观要求。1、确保管道内水位不大于管道直径的五分,管道封堵,降低水位,拒绝管道机器人带水作业,以免影像机器人摄像头的拍摄清晰度;2、为避免管道内沉积的污泥或者障碍物影响管道机器人的爬行和检查,在作业之前要做好管道疏通和清洗工作。3、遇到机器人无法推进、镜头污渍、镜头泡水、管道视线不清晰等情况,应该中止检测,保证管道机器人摄像的清晰度。宣城管道检测与评估参考价格检测的内容包括排水管道的形状、断面、壁厚、材质,以及排水管道运行情况。
管子的直径可分为外径、内径、公称直径。管材为无缝钢管的管子的外径用字母D来表示,其后附加外直径的尺寸和壁厚,例如外径为108的无缝钢管,壁厚为5MM,用D108*5表示。塑料管也用外径表示,如De63。其他如钢筋混凝土管、铸铁管、镀锌钢管等采用DN表示。在设计图纸中一般采用公称直径来表示,公称直径是为了设计制造和维修的方便人为地规定的一种标准,也叫公称通径,是管子(或者管件)的规格名称。管子的公称直径和其内径、外径都不相等,例如:公称直径为100MM的无缝钢管有102*5、108*5等好几种,108为管子的外径,5表示管子的壁厚,因此,该钢管的内径为(108-5-5)=98MM,但是它不完全等于钢管外径减两倍壁厚,也可以说,公称直径是接近于内径,但是又不等于内径的一种管子直径的规格名称,在设计图纸中所以要用公称直径,目的是为了根据公称直径可以确定管子、管件、阀门、法兰、垫片等结构尺寸与连接尺寸,公称直径采用符号DN表示,如果在设计图纸中采用外径表示,也应该作出管道规格对照表,表明某种管道的公称直径,壁厚。
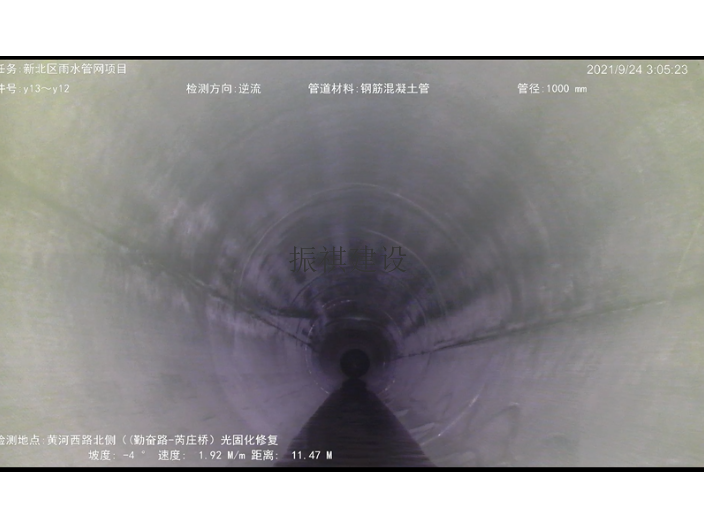
管道检测现场勘察管道,了解管径、流向、水位、上下游连接关系有助于确定具体的施工步骤。首先判断水位,爬行器式CCTV检测需要将水位控制在管径的三分之一以下,同时应保证管道干净,如果管道水位无法达到检测要求则需进行临时封堵并抽水;如果管道内淤泥量多,还应进行必要的疏通清洗以保证TV检测的清晰完整,其疏通方案见上述章节。当进行大管径主干管道CCTV检测时,一般管径超过Φ1000的主干管道水量较大,不允许长时间断水作业,故计划协调泵站配合降水,然后在不断水的情况下在管道内穿绳,作为漂浮筏的牵引绳,将CCTV设备系于漂浮筏上进行检测。管道QV(Quick View)检测仪通过转动手柄和变换焦距使窨井或管道内的情况一览无余了。

管道机器人设备使用时选择合适功率的电源,电源功率选择不合适,可能会导致工作时系统掉电,推荐使用市电、1KW以上发电机、峰值功率1KW以上的移动电源等。主机连接主机可以通过有线或无线两种方式与电缆盘连接,但是同时使用有线和无线与电缆盘连接时可能会有计数值跳动的异常。因此在选择一种连接方式后,需要关闭另外一种网卡适配器。为获取更好的图像效果,推荐使用有线连接。开启软件在设备连接成功后,需要稍等约30秒开启软件,过早的开启软件,可能会出现“摄像头登陆失败”、“爬行器连接失败”之类的问题,软件开启后,可能没有图像。这属于正常现象,只需要关闭软件,稍等片刻,重新启动即可。管道检测现场勘察管道,了解管径、流向、水位、上下游连接关系有助于确定具体的施工步骤。淮南排水管道检测与评估大概费用
江苏振祺建设工程有限公司:市政排水管网综合服务企业。三明雨水管道检测与评估是什么
据管道机器人的不同驱动模式,大致可以分为八种。种是流动式机器人,这类机器人没有驱动装置,只是随着管内流体流动,属于不需要消耗能源的被动型机器人,但是其运动模式相当有限。第二种是轮式机器人,这一类机器人***运用于管道检查工作,许多的商业机器人就是这一类型。第三种是履带式机器人,即用履带代替轮子。第四种是腹壁式机器人,这类机器人通过可以伸张的机械臂紧贴管道内壁,推动机器人前进。第五种是行走式机器人,这类机器人通过机械足运动,但是这类机器人需要大量驱动器,并且难以控制。第六种是蠕动式机器人,这类机器人像蚯蚓一样通过身体的伸缩前进。第七种是螺旋驱动式,即驱动机构做旋转运动,螺旋前进。第八种是蛇型机器人,这类机器人有许多关节,像蛇一样前行。三明雨水管道检测与评估是什么
与管道检测与评估相关的文章

金华钢筋混凝土管道检测与评估
- 铜陵砼管道检测与评估包括哪些 2026-03-03
- 镇江排水管道检测与评估服务电话 2026-03-03
- 马鞍山PVC管道检测与评估包括什么 2026-03-03
- 淮北开挖修复管道检测与评估价格咨询 2026-03-02
- 盐城雨水管道检测与评估包括什么 2026-03-02
- 福建钢筋混凝土管道检测与评估什么价格 2026-03-02
- 宿迁排水管道检测与评估 2026-02-28
- 浙江市政管道检测与评估价钱 2026-02-27
- 宿州雨水管道检测与评估施工 2026-02-26
- 铜陵钢筋混凝土管道检测与评估施工 2026-02-12
- 福州市政管道检测与评估参考价格 2026-02-11
- 无锡管道检测与评估咨询报价 2026-02-10
与管道检测与评估相关的产品


与管道检测与评估相关的新闻
-
镇江管道检测与评估维修电话 2026-02-05 05:03:15管道检测修复主要包含以下两方面:1、功能性检测:管道检测修复的排水管道功能性检测主要是以检查管道排水功能为目的的检测,一般检测管道的有效过水断面,并将管道实际过流量与设计流量进行比较,以确定管道的功能性状况。2、结构性检测:管道检测修复的排水管道结构性检测主要是以检查管道材料结构现状为目的的检测,这...
-
六安非开挖修复管道检测与评估 2026-02-05 04:03:411、使用CCTV管道检测,减少了工人下井作业的危险性。人员可一直在安全的位置远程操控机器人,即可根据机器人拍摄的影像资料,对管道内部存在的问题进行详细的位置确定、缺陷性质的判断。2、CCTV管道检测管道内部进行摄影检测,如腐蚀、穿孔、锈层、裂纹等情况,然后根据管道情况出具评估报告,从而为修复方案提供...
-
福建市政管道检测与评估包括什么 2026-02-05 06:02:36管道机器人设备使用时选择合适功率的电源,电源功率选择如果不合适,可能会导致工作时系统掉电,推荐使用市电、1KW以上发电机、峰值功率1KW以上的移动电源等。主机连接主机可以通过有线或无线两种方式与电缆盘连接,但是同时使用有线和无线与电缆盘连接时可能会有计数值跳动的异常。因此在选择一种连接方式后,需要关...
-
亳州雨水管道检测与评估什么价格 2026-02-04 00:13:34管道无损检测指的是通过使用一些先进的检测设备检测出管道存在的缺陷问题,如管道CCTV检测机器人、QV视频检测仪、声呐检测仪等高科技产品能够很好的完成城市地下排水管道破损检测的工作,CCTV检测机器人能在井下360°无死角录像和拍照,并实时回传画面到地面控制端。QV视频检测仪可以获得高清晰度管道内部图...
与管道检测与评估相关的问题
新闻资讯
产品推荐
-

溧阳污水管道疏通养护什么价格
2026-03-07 -

南通钢筋混凝土管道疏通养护价格咨询
2026-03-06 -
钟楼区市政管道疏通养护维修电话
2026-03-06 -

崇川区管道疏通养护大概费用
2026-03-06 -

崇川区非开挖修复管道疏通养护咨询报价
2026-03-05 -

海安砼管道疏通养护价格咨询
2026-03-05 -
启东PVC管道疏通养护价格咨询
2026-03-05 -
金华钢筋混凝土管道检测与评估
2026-03-04 -

肇庆市政排水管网管道非开挖修复包括哪些
2026-03-04