- 品牌
- 苏州森合知库
- 型号
- SHS1000
- 是否定制
- 是
WMS 四向车的路径优化功能依赖于 WMS 系统的 “动态路径规划算法”,该算法基于 Dijkstra 算法优化,可结合实时货位占用情况、设备位置、作业任务优先级,计算比较好作业路径。当四向车接收作业任务时,WMS 会先分析目标货位周边的货位占用状态 —— 若直达路径的货位已占用(有其他设备作业),系统会自动规划迂回路径,避免设备拥堵;同时,算法还会考虑多任务的顺序优化,如将同一通道内的多个作业任务按距离排序,减少设备往返次数。某物流中心的 WMS 系统管理 30 台四向车,传统路径规划模式下,设备日均迂回里程达 50km,作业效率低;引入动态路径优化后,日均迂回里程降至 20km,作业时间缩短 30%。某电商仓的 “双十一” 大促期间,单日订单量达 10 万单,WMS 通过路径优化,将 30 台四向车的作业任务按区域划分,每台设备负责特定通道的作业,避免跨区域迂回;实际运行中,设备单日作业量达 1.5 万次,订单出库率达 100%,无任何作业延误。此外,路径优化算法还支持 “紧急任务插入”—— 当有紧急订单(如生鲜食品出库)时,系统可调整路径优先级,让设备优先处理紧急任务,紧急订单的作业响应时间从 10 分钟缩短至 3 分钟,提升客户满意度。四向车提升机采用变频调速技术,提升速度可达 0.8m/s,垂直转运效率较传统提升机提升 25%。苏州全自动四向车小车
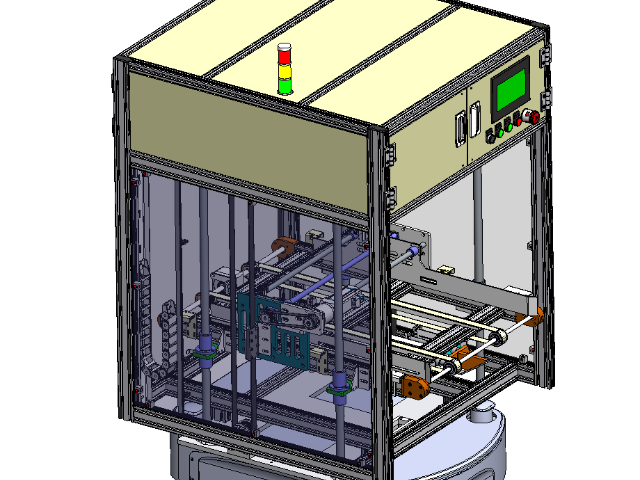
四向车的技术先进性集中体现在三大主要特征的协同运作,构建了无人化搬运的基础。双轮系驱动是其实现多向运动的机械基础,两套单独轮系分别对应 X、Y 方向,通过 PLC 控制轮系切换,使设备可在任意节点实现 90° 换向,无需掉头空间,这一设计打破了传统搬运设备的行驶方向限制,尤其适配狭窄巷道的密集存储布局。自动换向技术则依赖于反射光电与校正片的精细配合,当设备行驶至换向点时,两个间距 10cm 的光电传感器会扫描 10.3cm 长的校正片,通过检测信号同步性调整车身位置,确保换向时轮系与轨道精细对接,避免偏移。换层作业作为三维仓储的关键环节,通过与提升机的联动实现,带车模式下四向车自动驶入提升机货台,随货物一同升降至目标楼层,全程无需人工干预,作业效率较不带车模式提升 30% 以上。这些机械特征与智能化调度系统深度融合,通过 WCS 系统接收订单指令后,自动分配作业任务、规划比较好路径,实现多车协同、动态避障,从货物入库、存储、盘点到出库的全流程无人化操作,不*降低了人工成本,更将作业差错率控制在 0.1% 以下,为仓储物流的高效运转提供了主要支撑。苏州wms四向车官网WMS 四向车可与仓储管理系统(WMS)实时数据交互,同步货位信息、订单需求与作业状态。
立库四向车的货位记忆功能基于 “存储芯片 + 坐标映射” 技术,设备内置 EEPROM 存储芯片,可存储 10 万 + 个货位的三维坐标(X 轴:通道位置、Y 轴:层间位置、Z 轴:货位深度),通过与立库管理系统(WMS)同步数据,实时更新货位占用状态。当设备接收存取任务时,无需实时扫描定位,可直接调用存储的货位坐标,规划比较好路径,减少空驶时间。某电商立库存储 SKU 达 8 万种,传统设备完成一次存取需先扫描货位二维码定位(耗时 15 秒),再行驶至目标货位;引入该设备后,调用货位记忆坐标只有需 2 秒,单次存取时间从 60 秒缩短至 45 秒,效率提升 25%。同时,货位记忆功能还支持 “批量作业”—— 设备可一次性接收 10 个货位的存取任务,按坐标规划比较好行驶路径,避免重复往返;某快消品仓库的测试显示,批量作业模式下,设备空驶里程较单次作业模式减少 40%,单日作业次数从 1000 次提升至 1400 次,大幅提升立库整体作业效率。
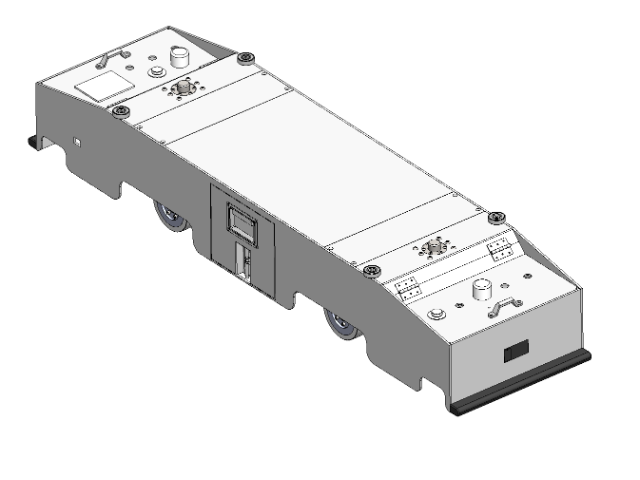
四向车穿梭车的货位适配性通过 “可调式货叉 + 模块化车身” 实现,货叉伸缩行程覆盖 1.2-2.5m,可兼容从 400mm×600mm 的小型料箱到 1200mm×1000mm 的标准托盘。在电商仓储场景中,某平台仓存储 SKU 超 5 万种,涵盖食品、日用品、电子产品等,传统设备需按货物尺寸划分专属存储区域,导致空间利用率不足 60%;引入该设备后,通过动态调整货叉行程,同一货架可混合存储不同尺寸货物,空间利用率提升至 85%。此外,设备支持 “货位记忆功能”,通过存储货物坐标与尺寸数据,可快速定位目标货位,拣选效率提升 40%—— 该仓库日均订单处理量从 3 万单提升至 5 万单,且拣选错误率控制在 0.1% 以下,完美适配电商多品类、高周转的仓储需求。定制化四向车可根据仓储通道宽度(1.8m)优化转向半径,适配狭窄通道的灵活运行。

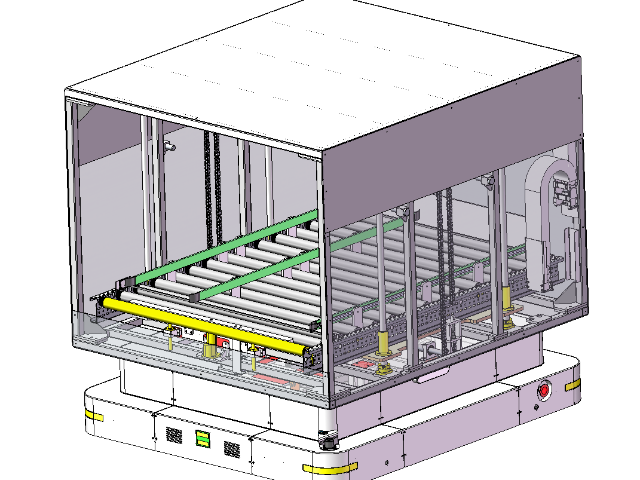
四向车提升机的双立柱导向结构是保障运行平稳性的主要,两根立柱平行安装,间距误差≤1mm,立柱表面采用精密磨削处理,粗糙度达 Ra0.8μm,配合货台两侧的导向轮(材质为聚氨酯,硬度 70 Shore A),形成 “双轨导向” 机制。在提升过程中,导向轮与立柱导轨紧密贴合,可抵消货物偏心负载产生的晃动,使运行平稳性误差控制在≤2mm。这一特性对四向车对接货位至关重要 —— 当提升机到达目标楼层时,需与楼层货架的轨道精细对接,若平稳性误差过大,可能导致四向车无法顺利驶入货架轨道。在某汽车零部件仓库的测试中,该提升机在满载 500kg 货物的情况下,连续 1000 次提升对接,对接成功率达 100%,且轨道对接间隙均≤2mm,确保四向车可快速切换至货架作业。此外,双立柱结构还提升了设备的抗倾覆能力,在突发断电等极端情况下,货台可通过制动装置稳定停靠,避免坠落风险,保障仓储作业安全。WMS 四向车可配合 WMS 完成动态盘点,通过扫码与货位比对,盘点准确率达 99.9% 以上。广东四向车AGV
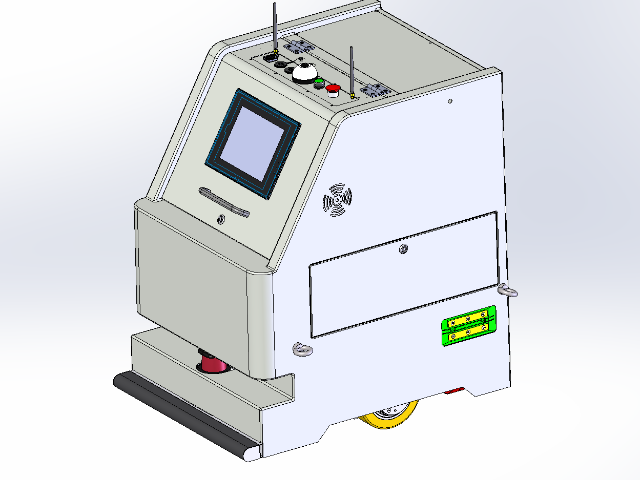
四向车提升机具备与四向车的联动控制功能,通过信号交互实现自动对接,无需人工干预。苏州全自动四向车小车
四向车调度系统的主要价值,在于通过智能算法提升多设备协同效率,避免资源浪费。多车协同功能基于 “任务池 + 分配算法” 实现:WCS 系统将所有作业任务(入库、出库、盘点)汇总至任务池,调度系统根据各四向车的实时位置(如距离货位较近的车优先分配任务)、负载状态(空载车优先分配入库任务)、故障情况(正常运行的车优先分配紧急任务),自动分配任务,避免部分设备闲置、部分设备过载的情况 —— 例如电商大促期间,10 台四向车可通过协同作业,将出库效率提升至单台作业的 8-9 倍(考虑避障与路径重叠时间)。动态避障功能则通过 “实时位置共享 + 路径预判” 实现:每台四向车每秒向调度系统上传 3 次位置信息,系统根据所有车辆的位置与行驶方向,预判是否存在路径交叉;若发现两台车将在 10s 内到达同一交叉点,系统会指令后出发的车辆暂停,或调整其中一台车的行驶路径(如绕行相邻巷道),避免碰撞。订单优先级优化功能,可根据业务需求设置权重(如医药急救药品订单优先级为比较高,普通日用品订单为常规),调度系统在分配任务时,优先执行高优先级订单 苏州全自动四向车小车
苏州森合知库机器人科技有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在江苏省等地区的机械及行业设备中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,**协力把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来苏州森合知库机器人科技供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!
在医药行业,四向车系统凭借精细、可控的作业特性,成为解决拆零拣选难题的主要方案。医药拆零拣选面临两大挑战:一是药品 SKU 繁多(如连锁药房仓库 SKU 可达 10000 种以上),传统人工拣选效率低、差错率高;二是需满足 GSP(药品经营质量管理规范)要求,如药品追溯、温湿度监控、避免交叉污染。四向车的箱式多穿系统通过 “货到人” 拣选模式解决这些问题:系统根据订单将药品料箱自动运送至拣选台,拣选人员只需按屏幕提示完成拣选,无需在仓库内走动,拣选效率提升 3 倍以上,差错率控制在 0.05% 以下;同时,系统通过 RFID 技术记录每盒药品的入库、存储、出库信息,实现全生命周期追溯,满足 G...
- 深圳自动化四向车项目 2026-03-09
- 深圳汽车四向车厂商排名 2026-03-09
- 化工四向车行业 2026-03-08
- 深圳化工四向车系统 2026-03-07
- 苏州工厂四向车行业 2026-03-07
- 浙江四向车系统 2026-03-06
- 广东电子四向车 2026-03-06
- 苏州化工四向车官网 2026-03-06
- 苏州四向车 2026-03-05
- 货运四向车自动叉车 2026-03-05







- 广州智能仓储物流四向车 03-09
- 江西四向车 03-09
- 湖南智能自动导航AGV 03-09
- 深圳自动化四向车项目 03-09
- 深圳汽车四向车厂商排名 03-09
- 重庆新能源自动导航AGV 03-08
- 广州化工仓储物流 03-08
- 北京货运自动导航AGV 03-08
- 天津新能源仓储物流自动叉车 03-08
- 化工四向车行业 03-08