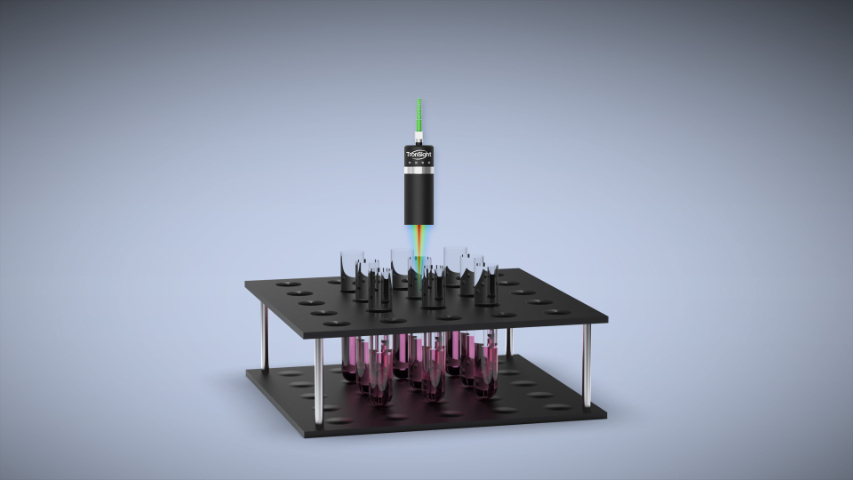
光谱共焦传感器如何工作?共焦色度测量原理通过使用多透镜光学系统将多色白光聚焦到目标表面来工作。透镜的排列方式是通过控制色差(像差)将白光分散成单色光。工厂校准为每个波长分配了一定的偏差(特定距离)。只有精确聚焦在目标表面或材料上的波长才能用于测量。从目标表面反射的这种光通过共焦孔径到达光谱仪,该光谱仪检测并处理光谱变化。共焦测量提供纳米分辨率并且几乎与目标材料分开运行。在整个传感器的测量范围内,实现了一个非常小的、恒定的光斑尺寸,通常 <10 µm。微型径向和轴向共焦版本可用于测量钻孔或钻孔的内表面,以及测量窄孔、小间隙和空腔。光谱共焦技术可以在不同领域的科学研究中发挥重要作用。安徽光谱共焦出厂价
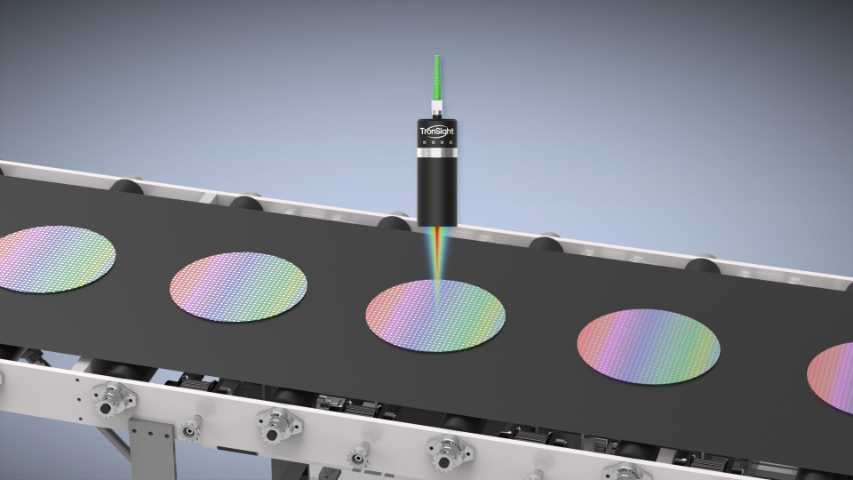
光谱共焦传感器专为需要高精度的测量任务而设计,通常是研发任务、实验室和医疗、半导体制造、玻璃生产和塑料加工。除了对高反射、有光泽的金属部件进行距离测量外,这些传感器还可用于测量深色、漫射材料,以及透明薄膜、板或层的单面厚度测量。传感器还受益于较大的间隔距离(高达 100 毫米),从而为用户在使用传感器的各种应用方面提供更大的灵活性。此外,传感器的倾斜角度已显着增加,这在测量变化的表面特征时提供了更好的性能。辽宁光谱共焦详情该技术可以采集样品不同深度处的光谱信息进行测量。

光谱共焦位移传感器原理,由光源、透镜组、控制箱等组成。光源发出1束白光,透镜组先将白光发散成一系列波长不同的单色光,然后经同轴聚焦在一定范围内形成1个连续的焦点组,每个焦点的单色光波长对应1个轴向位置。当样品处于焦点范围内时,样品表面将聚焦后的光反射回去。这些反射回来的光经过与镜头组焦距相同的聚焦镜再次聚焦后通过狭缝进入控制箱中的单色仪。因此,只有焦点位置正好处于样品表面的单色光才能聚焦在狭缝上。单色仪将该波长的光分离出来,由控制箱中的光电组件识别并 得到样品的轴向位置。采用高数值孔径的聚焦镜头可以使传感器达到较高分辨率,满足薄膜厚度分布测量要求。
在点胶工艺中生成的胶水小球目前只能通过视觉系统检验。在生产中必须保证点胶路线是连贯和稳定的,而通过色散共焦测量传感器系统就能够控制许多质检标准中的很多参数。胶水小球相对于其他结构必须安置在正中间。在点胶起始和结束的异常的材料积聚能被检测出来。色散共焦测量就连缺口也能被检测到。在3C领域,对于精密点胶的要求越来越高,这就要求必须实时检测胶水高度来实现精密点胶的闭环控制。由于胶水有透明及非透明多种材质,并且胶型轮廓较为复杂,倾斜角度大,传统激光传感器无法准确测量出胶水轮廓高度。创视智能探头拥有的测量角度,可以适用于各种胶水轮廓高度测量,特别是在圆孔胶高检测拥有的优势。所以目前业界通用做法,就是采用超大角度光谱共焦传感器,由于光谱共焦传感器采用白光,白光是复合光,总会有光线可以反射回来,而且针对弧面,加大了光笔的反射夹角(45°),所以才能完美的测出白色透明点胶的轮廓。基于白光LED的光谱共焦位移传感器是一种新型的传感器。

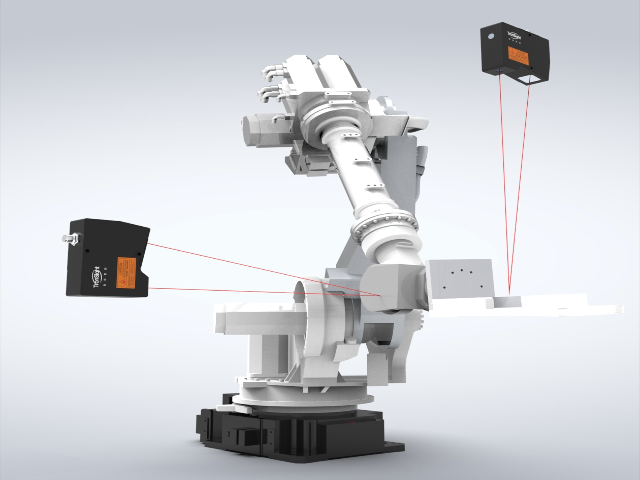
表面粗糙度测量方法具体流程如下:(1)待测工件定位。将待测工件平稳置于坐标测量机测量平台上,调用标准红宝石测针测量其空间位置和姿态,为按测量工艺要求确定测量位置提供数据。(2)轮廓扫描。测量机测量臂更换挂载光谱共焦传感器的光学探头,驱动探头运动至工件测量位置,调整光源光强、光谱仪曝光时间和采集频率等参数以保证传感器处于较好的工作状态,编辑扫描步距、速度等运动参数后启动轮廓扫描测量,并在上位机上同步记录扫描过程中的横向坐标和传感器高度信息,映射成为测量区域的二维微观轮廓。(3)表面粗糙度计算与评价。将扫描获取的二维微观轮廓数据输入到轮廓处理算法内进行计算,按照有关国际标准选择合适的截止波长,按高斯轮廓滤波方法对原始轮廓进行滤波处理,得到其表面粗糙度轮廓,并计算出粗糙度轮廓的评价中线,再按照表面粗糙度的相关评价指标的计算方法得出测量结果,得到被测工件的表面粗糙度信息。光谱共焦位移传感器可以实现对材料的表面形貌进行高精度测量,对于研究材料的表面性质具有重要意义。松江区光谱共焦常用解决方案
光谱共焦技术的研究集中在光学系统的设计和优化,以及数据处理和成像算法的研究。安徽光谱共焦出厂价
主要是对光谱共焦传感器的校准后的误差进行分析。各自利用干涉仪与高精密测长机对光谱共焦传感器开展测量,用曲面测针确保光谱共焦传感器的激光光路坐落于测针,以确保光谱共焦传感器在测量时安装精密度,随后拆换平面图歪头,对光谱共焦传感器开展校准。用小二乘法对测量数据进行解决,获得测量数据库的离散系统误差。结果显示:高精密测长机校准后的离散系统误差为 0.030%,激光器于涉仪校准时的分析线形误差为0.038%。利用小二乘法开展数据处理方法及离散系统误差的计算,减少校准时产生的平行度误差及光谱共焦传感器的系统误差,提高对光谱共焦传感器的校准精密度。安徽光谱共焦出厂价