三坐标测量机是加工现场常用的高精度产品尺寸及形位公差检测设备 ,其具有通用性强,精确可靠等优点。本文面向一种特殊材料异型结构零件内曲面的表面粗糙度测量要求,提出一种基于高精度光谱共焦位移传感技术的表面粗糙度集成在线测量方法,利用工业现场常用的三坐标测量机平台执行轮廓扫描,并记录测量扫描位置实时空间横坐标,根据空间坐标关系,将测量扫描区域的微观高度信息和扫描采样点组织映射为微观轮廓,经高斯滤波处理和评价从而得到测量对象的表面粗糙度信息。光谱共焦技术的研究对于相关行业的发展具有重要意义。工厂光谱共焦免费咨询

随着精密仪器制造业的发展,对工业生产测量的精度和适应性要求越来越高,需要具有高精度、适应性强和实时无损检测等特性的位移传感器。光谱共焦位移传感器的问世解决了这个问题,它是一种非接触式光电位移传感器,可达到亚微米级甚至更高的测量精度。传感器对于杂光等干扰光线并不敏感,具有较强的抵抗能力,适应性强,且具有小型化的特点,应用前景广阔。光学色散镜头是光谱共焦位移传感器的重要组成部分之一 ,其性能参数对于位移传感器的测量精度和分辨率具有决定性作用。防水型光谱共焦定做价格光谱共焦技术具有轴向按层分析功能,精度可以达到纳米级别。

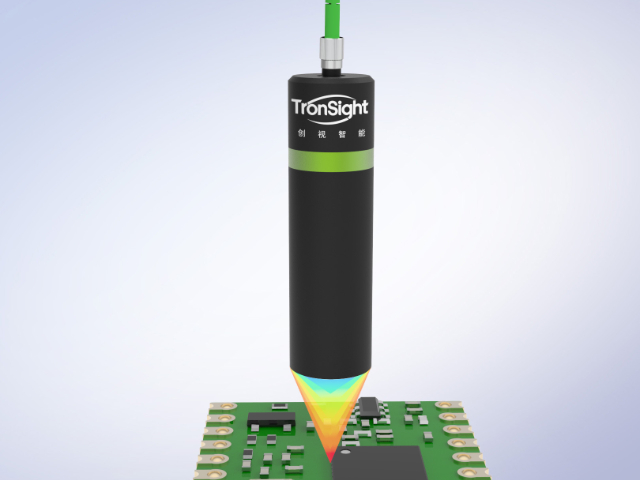
光谱共焦位移传感器包括光源、透镜组和控制箱等组成部分。光源发出一束白光,透镜组将其发散成一系列波长不同的单色光,通过同轴聚焦在一定范围内形成一个连续的焦点组 ,每个焦点的单色光波长对应一个轴向位置。当样品位于焦点范围内时,样品表面会聚焦后的光反射回去,这些反射回来的光再经过与镜头组焦距相同的聚焦镜再次聚焦后通过狭缝进入控制箱中的单色仪。因此,只有位于样品表面的焦点位置才能聚焦在狭缝上,单色仪将该波长的光分离出来,由控制箱中的光电组件识别并获取样品的轴向位置。采用高数值孔径的聚焦镜头可以使传感器达到较高分辨率,满足薄膜厚度分布测量要求。
由于每一个波长都可以固定一个距离值,因此,通过将光谱山线峰值波长确定下来,就可以将精确的距离值推算出来。假设传感器与物体表面存在相对移动,此时物体表面的中心点恰好处在单色光(A1)的像点处,可以作出光谱仪探测到的光谱曲线。通过测量得到不同的波长值,可以将物体表面不同点之间的相对位移值计算出来。如果配上精细的扫描机构,就可以对整体的二维表面轮廓及形貌进行精确的测量。相比其他传统的位移传感器 ,光谱共焦传感器凭借独特的测量原理,具有测量效率高、精度高、体积小、非接触等特点,在各个领域都得到了大量的应用。光谱共焦位移传感器可以用于材料、结构和生物等领域的位移和形变测量。

光谱共焦位移传感器是一种用于测量物体表面形貌的先进技术。在工业生产中,玻璃瓶是一种常见的包装容器,其厚度对于产品的质量和安全性至关重要。因此,精确测量玻璃瓶厚度的方法对于生产过程至关重要。本文将介绍一种利用光谱共焦位移传感器测量玻璃瓶厚度的具体方法。首先,我们需要准备一台光谱共焦位移传感器设备。该设备通过激光束照射到玻璃瓶表面,利用光谱共焦原理来测量玻璃瓶表面的形貌和厚度。其工作原理是通过测量激光束反射回来的光谱信息,来计算出玻璃瓶表面的形貌和厚度。接下来,我们需要将玻璃瓶放置在测量台上,确保其表面平整且垂直于光谱共焦位移传感器的激光束。然后,我们启动设备,让激光束照射到玻璃瓶表面,开始进行测量。在测量过程中,光谱共焦位移传感器会实时采集玻璃瓶表面的光谱信息,并通过内置算法计算出玻璃瓶的厚度。同时,设备会将测量结果显示在屏幕上,以便操作人员进行实时监控和记录。在测量完成后,我们可以通过导出数据来对测量结果进行进一步分析和处理。通过对测量数据的分析,我们可以得到玻璃瓶不同位置处的厚度分布情况,以及整体的厚度均值和偏差值。这些数据可以帮助生产过程中对玻璃瓶的质量进行评估和控制 。光谱共焦技术的研究和应用将推动中国科技事业的发展;国内光谱共焦详情
光谱共焦技术可以测量位移,利用返回光谱的峰值波长位置。工厂光谱共焦免费咨询
表面粗糙度测量方法具体流程如下 :(1)待测工件定位。将待测工件平稳置于坐标测量机测量平台上,调用标准红宝石测针测量其空间位置和姿态,为按测量工艺要求确定测量位置提供数据。(2)轮廓扫描。测量机测量臂更换挂载光谱共焦传感器的光学探头,驱动探头运动至工件测量位置,调整光源光强、光谱仪曝光时间和采集频率等参数以保证传感器处于较好的工作状态,编辑扫描步距、速度等运动参数后启动轮廓扫描测量,并在上位机上同步记录扫描过程中的横向坐标和传感器高度信息,映射成为测量区域的二维微观轮廓。(3)表面粗糙度计算与评价。将扫描获取的二维微观轮廓数据输入到轮廓处理算法内进行计算,按照有关国际标准选择合适的截止波长,按高斯轮廓滤波方法对原始轮廓进行滤波处理,得到其表面粗糙度轮廓,并计算出粗糙度轮廓的评价中线,再按照表面粗糙度的相关评价指标的计算方法得出测量结果,得到被测工件的表面粗糙度信息。工厂光谱共焦免费咨询