装备的精密定位和运动控制是至关重要的。为了确保武器装备的高精度和高可靠性,需要使用高精度的测量和控制系统。激光位移传感器作为一种高精度、高灵敏度的传感器,已经成为武器装备制造和维护中必不可少的工具。激光位移传感器可以测量武器装备的位置和位移,以及其运动状态、速度和加速度等动态参数。它可以在武器装备运动时实时测量其位置和位移变化,同时可以快速响应,输出准确的控制信号,实现对武器装备的精密定位和运动控制。在武器装备制造中,激光位移传感器可以用于检测武器装备的加工精度和装配精度,并提供实时的反馈信号,以保证其精度和可靠性。同时,激光位移传感器还可以用于武器装备的调试和优化,以提高其性能和可靠性 。在武器装备维护中,激光位移传感器可以用于检测武器装备的运动状态、位置和位移变化,以及其结构和组件的磨损情况。通过准确测量武器装备的位置和位移变化,可以及时发现异常情况,并对武器装备进行维护和修理,以确保其性能和可靠性。总之,激光位移传感器在领域中的应用已经得到了的认可和应用。它为武器装备的制造和维护提供了重要的支持,并为提高武器装备的精度和可靠性做出了重要的贡献。激光位移传感器的研究有助于提高中国制造业的核心竞争力。非接触式位移传感器按需定制

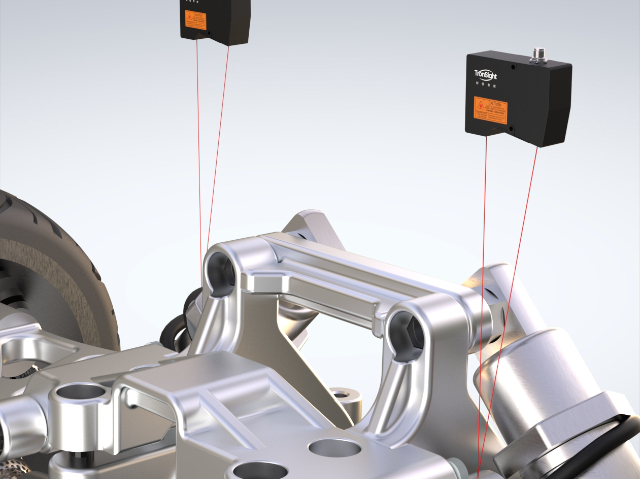
激光位移传感器在新能源光伏等行业应用中,具有非常重要的作用。例如,在风能发电领域中,激光位移传感器可以用于实时监测风力发电机叶片的位移,从而及时发现叶片的形变和振动情况 ,保证发电机的正常运行。此外,在新能源汽车领域中,激光位移传感器可以用于测量电池、电机等关键部件的位移情况,以提高电池的安全性和电机的效率。激光位移传感器在新能源光伏等行业应用中,具有良好的发展前景。随着新能源产业的不断发展,激光位移传感器在该领域的应用将越来越普遍。同时,随着激光技术的不断发展和完善,激光位移传感器的测量精度和稳定性将会得到进一步提高,为新能源光伏等行业的发展提供更加可靠的技术支持。工厂位移传感器找哪里不同的应用场景 需要选择不同类型的激光位移传感器 ,以满足测量要求。

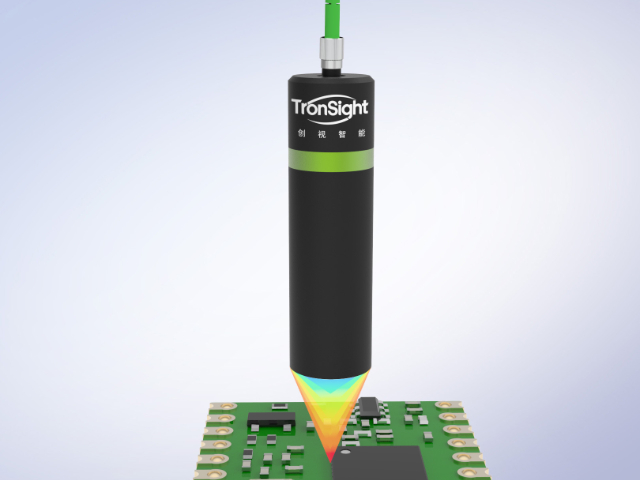
激光位移传感器是一种应用普遍的非接触式测量设备 ,其主要用于非标检测设备中。国内所使用的激光测量仪器几乎完全依赖于国外进口。该传感器具有同步功能,可用于差动测厚 、测长等,特别适用于工业自动化生产。激光位移传感器具有良好的测量性能,可用于在线测量位移、三维尺寸、厚度、表面轮廓、物体形变、振动、液位、工件分拣等应用。此外,该传感器还可用于大型构件如桥梁、飞机和舰船骨架、机床导轨的定位安装,以及动态监测重要构件在承载时发生微量变形。
激光位移传感器是一种利用光学三角法原理进行测量的仪器,其主要作用是测量被测物体的位移。激光位移传感器具有结构小巧、测量速度快、精度高、测量光斑小 、抗干扰能力强和非接触式的测量特点。近年来,随着现代光电技术的不断发展,激光位移传感器逐渐成为光电非接触检测产品的主流 。激光位移传感器的研究方向主要是如何提高其测量精度 、测量速度等性能,以更好地满足工业生产和科学研究的需求。位移传感器的研究和应用在工业自动化生产中具有广泛的应用和重要的研究意义。不同品牌和型号的激光位移传感器在性能 、价格、适用场景等方面存在差异。

高精度激光位移传感器是一种用于测量物体的位置和位移的重要设备 。在工业生产和科学研究领域,激光位移传感器被广泛应用,以确保精确的测量结果和稳定的性能。然而,安装操作是影响激光位移传感器性能的关键环节。本文将重点介绍高精度激光位移传感器安装操作的注意事项,以帮助用户正确、有效地进行安装。首先,安装位置的选择至关重要。在选择安装位置时,应考虑到测量目标的特性和环境条件。激光位移传感器对测量目标的表面特性和光照条件有一定要求,因此应选择平整、清洁的表面作为安装位置,并避免强烈的光线直接照射到传感器上。此外,还应考虑到传感器与测量目标之间的距离和角度,以确保测量结果的准确性和稳定性。激光位移传感器可以使用无线或有线连接到计算机 、控制器等设备、并进行数据传输和控制。推荐位移传感器的原理
激光位移传感器可分为点、线两种形式 。非接触式位移传感器按需定制
随后安装在贴装台单元上的激光位移传感器403检测键合头370上拾取的芯片的倾角,结合两位移传感器360和403的初始角度差值,利用调平机构340对芯片做出与贴装台401上贴装位间的平行调整;其调平的具体实现过程如下:音圈电机343动作,从而实现音圈模组341产生平行于电机轴向的位移,继而导致下方动平台342产生绕u轴或者v轴(与 u轴垂直)方向的转动,从而实现动平台342倾角的调整,使得连接在动平台上的键合头370与贴装台401上基板贴装位平行,保证键合压力均匀;非接触式位移传感器按需定制