企业商机
首页 > 企业商机
首页 > 企业商机
选择定制视觉检测服务,为您的产品打造完美的品质体验。完美的品质体验不体现在产品无缺陷,更在于细节处的精益求精。定制视觉检测服务会聚焦产品影响用户体验的关键细节,如家电产品的外壳接缝平整度、电子产品的按...
我们的定制视觉检测服务,确保每一个细节都尽善尽美。在产品检测中,细微缺陷可能成为影响产品性能或用户体验的 “短板”,我们的服务正是聚焦这些易被忽视的细节。针对电子元件,可定制微米级引脚间距检测方案,识...
无论您的产品有何种检测需求,我们都能提供定制化的解决方案。不同行业、不同类型的产品,检测需求千差万别:电子行业可能需要检测芯片引脚的微小变形,汽车零部件行业需核查表面涂层的均匀度,食品行业则要把控包装...
定制视觉检测服务,助力您的企业实现高效生产、品质保障。在高效生产方面,定制视觉检测服务可与生产线无缝对接,实现产品自动上料、自动检测、自动分拣,无需人工干预,大幅减少生产环节的人工等待时间,使生产线整...
专业的定制视觉检测,为您的产品提供品质保障。我们的专业性体现在对行业标准的深刻理解与技术的应用上。团队成员均具备 5 年以上机器视觉行业经验,熟悉各行业品质标准,如医疗器械需符合 FDA 相关要求,汽...
重点果园引入定制化视觉分选系统,该系统集成了高光谱成像、重量传感和自动分拣装置,可实现每小时处理8吨水果的产能。通过精确的糖度分级和外观筛选,质量果品比例从原来的45%提升到78%,直接带动年增收15...
选择定制视觉检测服务,为您的企业注入新的品质动力。在企业发展过程中,品质提升往往需要技术创新的推动,定制视觉检测服务正是借助先进的机器视觉技术,为企业品质管理升级提供助力。引入定制视觉检测后,企业可突...
我们的定制视觉检测服务,为您的企业提供品质保障。从方案设计到售后运维,我们始终以保障企业品质为目标。方案设计阶段,会结合行业标准与企业质量要求,制定覆盖生产全流程的检测方案,如原材料入库检测、半成品加...

瑕疵检测数据积累形成知识库,为质量分析和工艺改进提供依据。每一次瑕疵检测都会生成海量数据(如缺陷类型、位置、严重程度、生产批次、设备参数),将这些数据长期积累,可形成企业专属的 “瑕疵知识库”。通过数...
定制视觉检测服务,让您的产品检测更加高效、便捷。传统人工检测不耗时久,还需要工作人员具备专业技能,且检测流程复杂。定制视觉检测服务通过自动化技术简化检测流程,工作人员只需进行简单的设备启动与状态监控操...

实时瑕疵检测助力产线及时止损,发现问题即刻停机,减少浪费。在连续生产过程中,若某一环节出现异常(如模具磨损导致批量产品缺陷),未及时发现会造成大量不合格品,增加原材料与工时浪费。实时瑕疵检测系统通过 ...

多光谱成像技术提升瑕疵检测能力,可识别肉眼难见的材质缺陷。多光谱成像技术突破了肉眼与传统可见光成像的局限,通过采集产品在不同波长光谱(如紫外、红外、近红外)下的图像,捕捉材质内部的隐性缺陷 —— 这类...
瑕疵检测与 MES 系统联动,将质量数据融入生产管理,优化流程。MES 系统(制造执行系统)负责生产过程的计划、调度与监控,瑕疵检测系统与其联动,可实现质量数据与生产数据的深度融合:检测系统将实时缺陷...

瑕疵检测用技术捕捉产品缺陷,从微小划痕到结构瑕疵,守护品质底线。无论是消费品还是工业产品,缺陷类型多样,小到电子屏幕的微米级划痕,大到机械零件的结构性裂纹,都可能影响产品性能与安全。瑕疵检测技术通过 ...
我们的定制视觉检测,为您的企业提供品质监控和优化。品质监控并非停留在 “识别缺陷”,更在于 “预防缺陷”。我们的定制系统会实时采集生产各环节的检测数据,通过数据分析模型识别品质波动趋势 —— 当某一参...

陶瓷制品瑕疵检测关注裂纹、斑点,借助图像处理技术提升效率。陶瓷制品在烧制过程中易产生裂纹(如热胀冷缩导致的细微裂痕)、斑点(如原料杂质形成的异色点),传统人工检测需强光照射、反复观察,效率低下且易漏检...
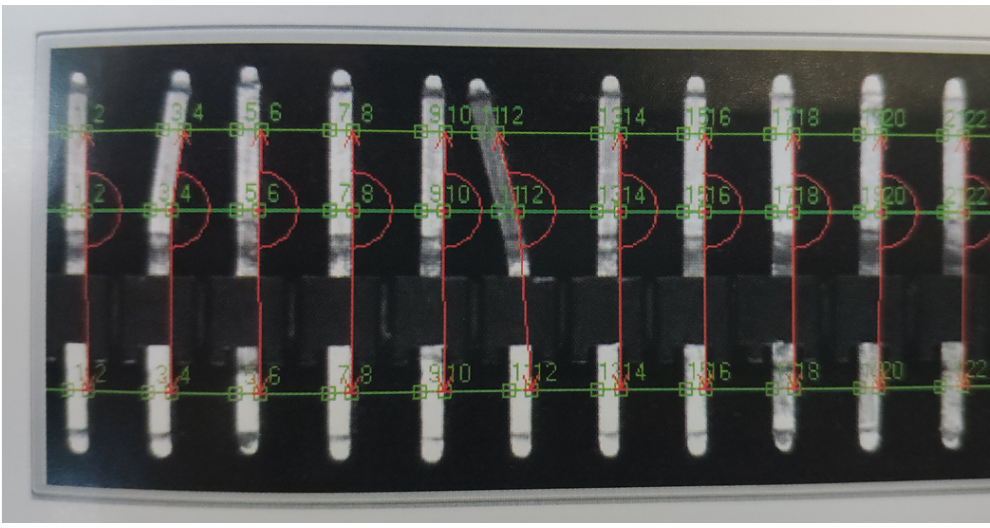
电子元件瑕疵检测聚焦焊点、裂纹,显微镜头下不放过微米级缺陷。电子元件体积小巧、结构精密,焊点虚焊、引脚裂纹等缺陷往往微米级别,肉眼根本无法分辨,却可能导致设备短路、死机等严重问题。为此,瑕疵检测系统搭...
瑕疵检测阈值设置影响结果,需平衡严格度与生产实际需求。检测阈值是判定产品合格与否的 “标尺”:阈值过严,会将轻微、不影响使用的瑕疵判定为不合格,导致过度筛选,增加生产成本;阈值过松,则会放过严重缺陷,...

PCB 板瑕疵检测需识别短路、虚焊,高精度视觉系统保障电路可靠。PCB 板作为电子设备的 “神经中枢”,短路(铜箔间异常连接)、虚焊(焊点与引脚接触不良)等瑕疵会直接导致设备故障,检测需达到微米级精度...

传统人工瑕疵检测效率低,易疲劳漏检,正逐步被自动化替代。传统人工检测依赖操作工用肉眼逐一排查产品,每人每小时能检测数十至数百件产品,效率远低于自动化生产线的节拍需求;且长时间检测易导致视觉疲劳,漏检率...
传统人工瑕疵检测效率低,易疲劳漏检,正逐步被自动化替代。传统人工检测依赖操作工用肉眼逐一排查产品,每人每小时能检测数十至数百件产品,效率远低于自动化生产线的节拍需求;且长时间检测易导致视觉疲劳,漏检率...
光伏板瑕疵检测关乎发电效率,隐裂、杂质需高精度设备识别排除。光伏板的隐裂(玻璃与电池片间的细微裂纹)、内部杂质会导致电流损耗,降低发电效率(隐裂会使发电效率下降 5%-20%),检测需高精度设备实现缺...

瑕疵检测速度需匹配产线节拍,避免成为生产流程中的瓶颈环节。生产线节拍决定了单位时间的产品产出量,若瑕疵检测速度滞后,会导致产品在检测环节堆积,拖慢整体生产效率。因此,检测系统设计需以产线节拍为基准:首...
瑕疵检测算法抗干扰能力关键,需过滤背景噪声,聚焦真实缺陷。检测环境中的背景噪声(如车间灯光变化、产品表面纹理、灰尘干扰)会导致检测图像出现 “伪缺陷”,若算法抗干扰能力不足,易将噪声误判为真实缺陷,增...
瑕疵检测报告直观呈现缺陷类型、位置,助力质量改进决策。瑕疵检测并非输出 “合格 / 不合格” 的二元结果,更重要的是通过检测报告为企业质量改进提供数据支撑。报告采用可视化图表(如缺陷类型分布饼图、缺陷...
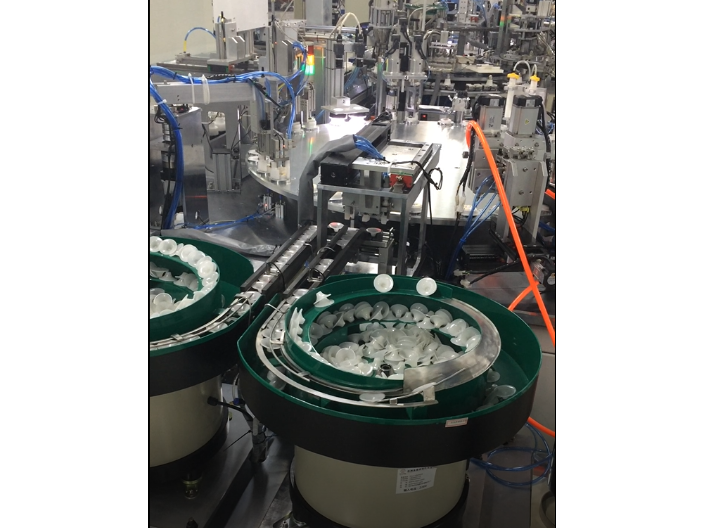
在线瑕疵检测嵌入生产流程,实时反馈质量问题,优化制造环节。在线瑕疵检测并非于生产的 “后置环节”,而是深度嵌入生产线的 “实时监控节点”,从原料加工到成品输出,全程同步开展检测。系统与生产线 PLC、...
瑕疵检测算法抗干扰能力关键,需过滤背景噪声,聚焦真实缺陷。检测环境中的背景噪声(如车间灯光变化、产品表面纹理、灰尘干扰)会导致检测图像出现 “伪缺陷”,若算法抗干扰能力不足,易将噪声误判为真实缺陷,增...

橡胶制品瑕疵检测关注气泡、缺胶,保障产品密封性和结构强度。橡胶制品(如密封圈、轮胎、软管)的气泡、缺胶等瑕疵,会直接影响使用性能:密封圈若有气泡,会导致密封失效、泄漏;轮胎缺胶会降低承载强度,增加爆胎...
3D 视觉技术拓展瑕疵检测维度,立体还原工件形态,识破隐藏缺陷。传统 2D 视觉检测能捕捉平面图像,难以识别工件表面凹凸、深度裂纹等隐藏缺陷,而 3D 视觉技术通过激光扫描、结构光成像等方式,可生成工...

在现代工业生产中,许多场景下产品处于高速运动或生产环境动态变化的状态,这对视觉检测算法的稳定性和准确性提出了极高要求。熙岳智能凭借深厚的技术研发实力,针对动态环境下的检测难题,研发出具有性能的视觉检测...
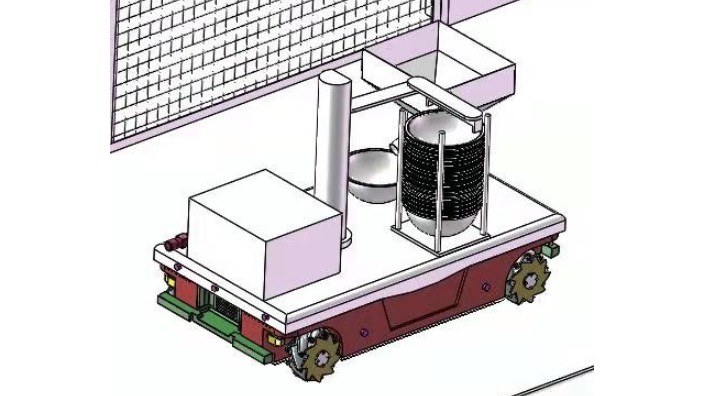
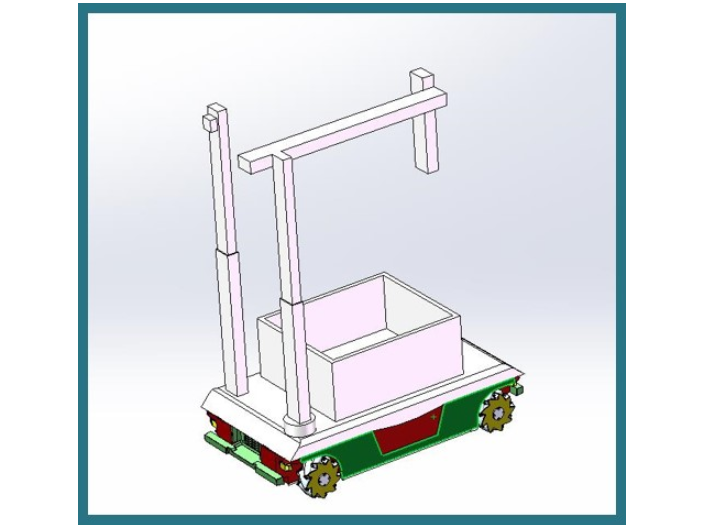
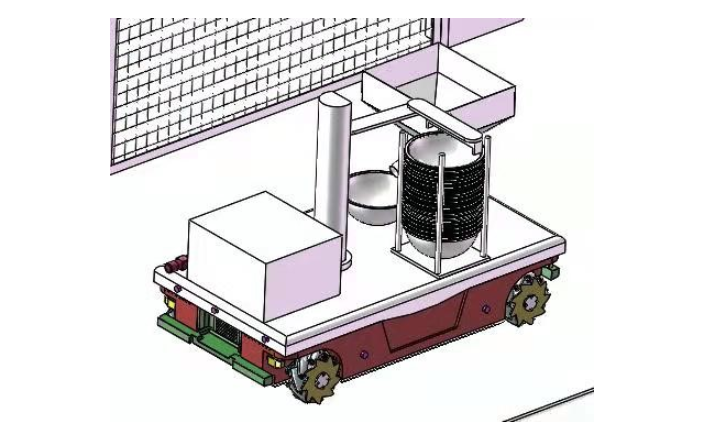
2026.03.10 福建品质智能采摘机器人按需定制
2026.03.10 天津自动化智能采摘机器人技术参数
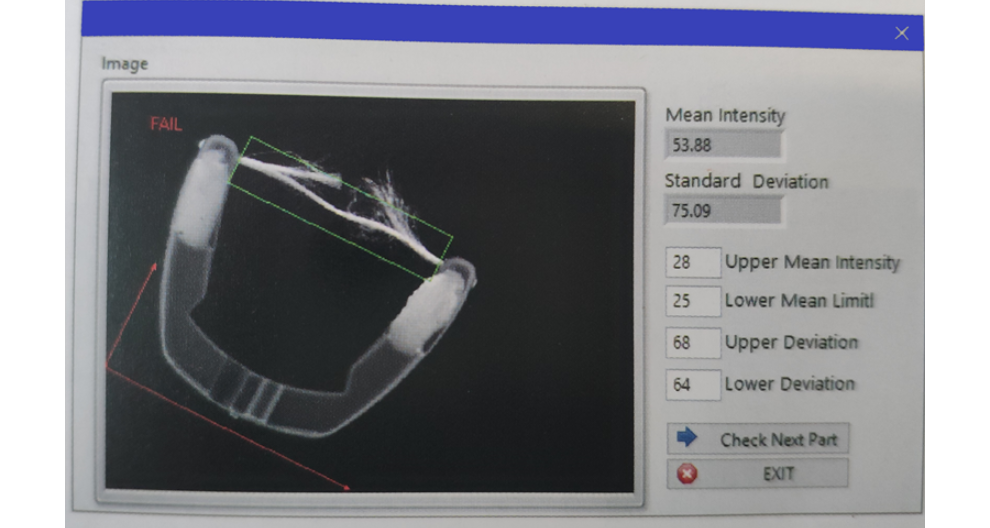
2026.03.10 福建压装机定制机器视觉检测服务处理方法
2026.03.10 浙江智能智能采摘机器人
2026.03.10 上海番茄智能采摘机器人案例
2026.03.10 江苏智能智能采摘机器人品牌
2026.03.10 江西自制智能采摘机器人公司
2026.03.09 天津节能智能采摘机器人制造价格
2026.03.09 安徽猕猴挑智能采摘机器人
2026.03.09 江苏智能智能采摘机器人公司
2026.03.09 小番茄智能采摘机器人定制
2026.03.09 上海番茄智能采摘机器人私人定做
2026.03.09 北京自动智能采摘机器人定制
2026.03.09 浙江制造智能采摘机器人定制
2026.03.08 上海压装机定制机器视觉检测服务价格低
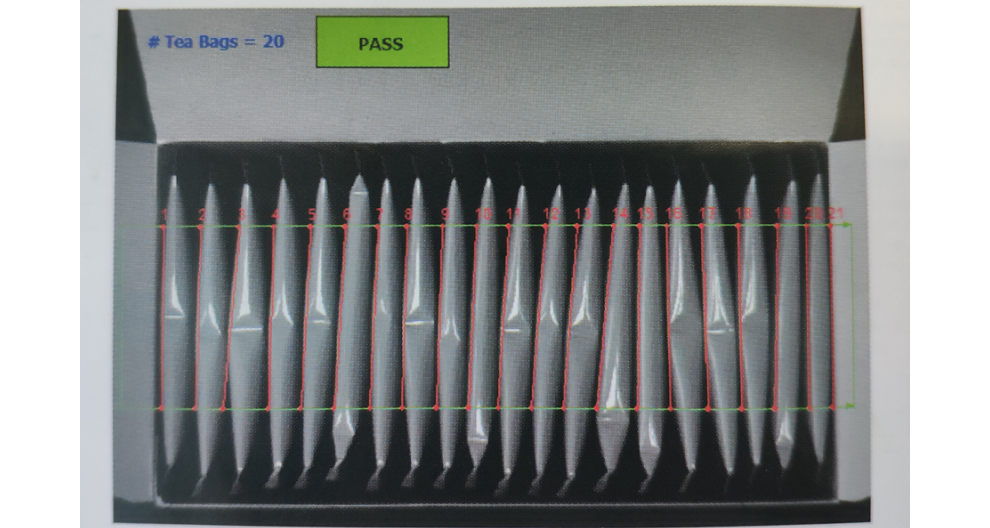
2026.03.08 天津榨菜包定制机器视觉检测服务趋势
2026.03.08 福建什么是智能采摘机器人公司
2026.03.08 江苏自制智能采摘机器人技术参数
2026.03.08 浙江aoi视觉检测设备
2026.03.08 北京多功能智能采摘机器人用途