-
重庆安保巡逻线控底盘应用范围
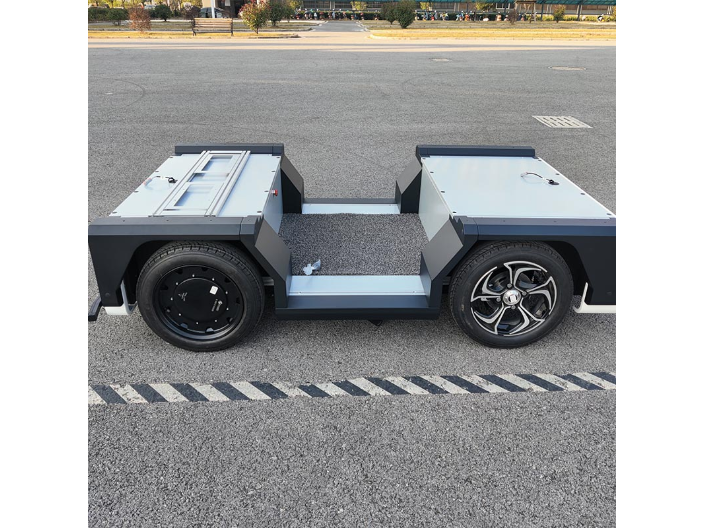
线控底盘概述。线控技术(X-By-Wire)源于飞机的控制系统,其将飞行员的操纵命令转化成电信号通过控制器控制飞机飞行。线控汽车采用同样的控制方式,可利用传感器感知驾驶人的驾驶意图,并将其通过导线输送...
查看详细 -
福建移动智能车应用范围

智能车的驱动形式主要有以下几种,每种形式具有不同的用途和应用场景:电动驱动:电动智能车使用电池或燃料电池作为主要动力来源,通过电动机将电能转化为机械动力。这种驱动形式通常用于城市交通、短途出行和环保出...
查看详细 -
山东四轮驱动四轮转向无人驾驶原理

无人驾驶技术对运输行业的影响将是深远的。首先,它将提高运输的安全性,减少由人为因素引起的交通事故,大幅降低运输过程中的风险,保护驾驶员和道路用户的生命安全。其次,无人驾驶系统将提高运输的效率,减少交通...
查看详细 -
陕西四轮驱动四轮转向无人车哪家便宜

越来越多的无人车、无人机的上路,在建设让我们生活更加高效和便捷的智慧物流体系之外,也能让普通民众打消对高科技的神秘感,让他们意识到前沿技术并不是虚无缥缈的诗和远方。借助大数据和AI等前沿技术,让中国物...
查看详细 -
江西带编码器ros方案设计

要在Linux上安装ROS,首先选择适合您的ROS版本(ROS1或ROS2)和Linux发行版(通常使用Ubuntu)。然后配置计算机以接受ROS软件包,通过终端运行适当的安装命令(对于ROS1通常是...
查看详细 -
广东自动驾驶无人驾驶机器人

驾驶环境对无人驾驶有着深远而多层次的影响。首先,道路和交通状况的复杂性直接影响了无人驾驶系统的技术要求。在城市拥堵、复杂路口和不断变化的交通情况下,无人驾驶系统需要更高级的感知、决策和控制能力,以确保...
查看详细 -
麦克纳姆轮无人驾驶前景
无人驾驶技术的发展受益于数字地图、定位和导航系统等基础设施的支持。通过高精度的地图和定位系统,无人驾驶汽车可以实现精确定位和导航,以及更准确的路径规划和决策制定。无人驾驶技术在提升交通安全、减少交通拥...
查看详细 -
云南自动驾驶无人驾驶商家

基础设施:为了支持无人驾驶汽车的发展,需要进行基础设施的升级。这包括道路标志、交通信号和通信网络的改进,以便车辆能够更好地与基础设施和其他车辆进行通信。一些城市已经开始为无人驾驶汽车提供特殊的测试道路...
查看详细 -
安徽阿克曼无人车商家

无人车需要新的法规和政策来规范其使用和确保安全性。随着无人车技术的迅速发展,现有的交通法规和政策通常无法充分适应自动驾驶的特殊需求。新的法规和政策可以包括以下方面:交通法规修改:修改现有的交通法规,以...
查看详细 -
朝阳区ros原理
在ROS中进行机器人的远程操作和监控可以通过以下步骤实现:首先,确保机器人和远程计算机连接到相同的网络,并具备ROS环境。然后,在机器人上运行ROS主要节点(roscore)以启用ROS通信。在远程计...
查看详细 -
云南ros厂家直销

汽车产业真正的革新已经开始,软件定义汽车的时代已经到来。汽车正加速从从机械设备向高度数字化、信息化的智能终端转变,涉及领域庞大并且复杂。一辆自动驾驶的汽车,从某种意义上来说,也是一个自动驾驶的机器人,...
查看详细 -
河南Apollo线控底盘原理
当今世界,汽车行业成为推动全球经济复苏的一个强劲引擎,充满活力的中国汽车市场正普及全球,迸发出源源不断的发展动力。随着以技术驱动为关键的产业重塑和以新生代不断涌入、新思潮不断涌现为主...
查看详细