 首页 > 新闻中心
首页 > 新闻中心
首页 > 新闻中心

机器人焊钳实现自动化焊接需要经过以下步骤:1.设计焊接程序:根据焊接要求和工件形状,设计出适合的焊接程序,包括焊接路径、焊接速度、焊接电流等参数。2.安装机器人焊钳:将机器人焊钳安装在焊接设备上,调整好焊接角度和位置。3.编写控制程序:编写控制程序,将焊接程序转化为机器人焊钳能够识别和执行的指令。4...

逆变焊机是一种新型的焊接设备,相比传统的变压器焊机,它具有更高的效率、更小的体积和更轻的重量。同时,逆变焊机还具有更好的电弧稳定性和焊接质量,因此在工业生产中得到了广泛的应用。就可靠性而言,逆变焊机的可靠性相对较高。首先,逆变焊机采用了先进的电子元器件和控制技术,具有更高的抗干扰能力和更稳定的工作性...

储能焊机是一种高能量密度的焊接设备,它通过储存电能并在瞬间释放,产生高温高压的电弧,从而实现焊接工件的熔接。相比传统的焊接方式,储能焊机具有焊接速度快、焊接质量高、焊接效率高等优点,因此在工业生产中得到广泛应用。储能焊机对焊接工件的外观和质量有着重要的影响。首先,储能焊机的高能量密度可以使焊接工件的...
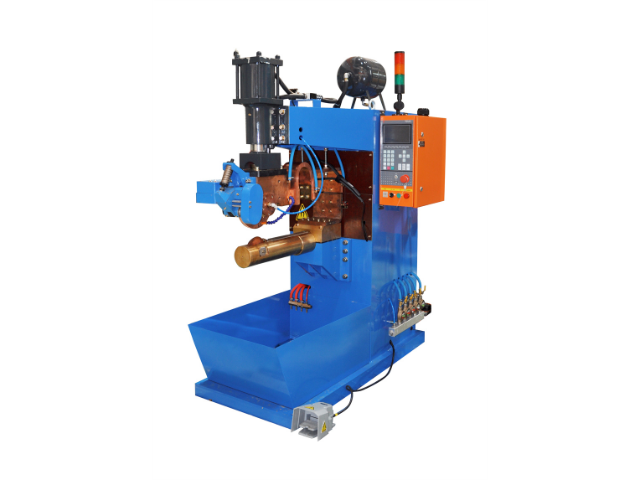
设备维护是保证缝焊机长期稳定运行的关键,必须定期进行。在日常维护中,需要注意以下几点:设备漏电:检查电线是否有破损或老化现象,如有及时更换电线。同时检查设备是否接地良好,需要时进行接地处理。机身过热:检查冷却系统是否正常工作,如有问题及时维修或更换。同时检查机身是否有杂物堆积,影响散热效果。其他问题...

机器人焊钳在焊接过程中保持稳定需要考虑以下几个方面:1.机器人的运动控制:机器人需要具备精确的运动控制能力,以确保焊钳在焊接过程中的稳定性。机器人的运动控制系统需要具备高精度的位置控制和速度控制能力,以确保焊钳在焊接过程中的稳定性。2.焊钳的结构设计:焊钳的结构设计需要考虑到焊接工件的形状和大小,以...

储能焊机是一种利用电容器或电感器储存能量的焊接设备。它的引弧和维持焊接的方法与传统的焊接设备有所不同。引弧方法:储能焊机的引弧方法是利用高压电容器或电感器储存的能量,通过放电产生高电压电弧,使焊接材料瞬间加热融化,形成焊缝。在引弧过程中,需要注意电容器或电感器的充电时间和放电时间,以确保电弧的稳定性...
机器人焊钳的工作原理是通过控制系统控制机器人的运动,使其按照预定的路径和速度进行运动,同时通过传感器感知焊接过程中的温度、电流、电压等参数,实现焊接的自动化。具体来说,机器人焊钳的工作原理包括以下几个方面:1.控制系统:机器人焊钳的控制系统包括硬件和软件两部分,硬件包括电机、传感器、控制器等,软件包...

逆变焊机的焊接电源是通过将交流电源转换为高频直流电源来实现的。其设计主要包括三个部分:整流器、滤波器和逆变器。整流器将交流电源转换为直流电源,通常采用桥式整流电路,将交流电源的正负半周分别整流为正向电流和反向电流,然后通过滤波器进行滤波。滤波器主要用于去除直流电源中的脉动,以保证焊接电流的稳定性。常...

储能焊机是一种特殊类型的焊接设备,它可以将电能转换为储能,并在需要时释放储能来完成焊接工作。根据不同的储能方式和应用场景,储能焊机可以分为多种类型,包括超级电容储能焊机、电池储能焊机、超导储能焊机等。超级电容储能焊机是一种利用超级电容器储存电能的焊接设备,它具有快速充放电、长寿命、高效率等优点,适用...

缝焊机在焊接过程中采用的是接触电阻焊接方式,相对于传统的电弧焊来说,能源利用率更高,更加节能。同时,由于缝焊机的焊接速度快,可以减少热量的产生和散失,减少了对环境的影响。此外,缝焊机还可以通过采用环保型的焊接材料和工艺,如使用低毒低烟的焊接材料、采用气体保护焊接等,更加符合环保要求。缝焊机的结构相对...
储能焊机是一种高效节能的焊接设备,其能耗相对较低。储能焊机的能耗主要来自于电源和电容器的充电过程,以及焊接过程中的电流和电压损耗。在储能焊机的设计中,通常采用高效的电源和电容器,以减少能耗。此外,储能焊机还采用了先进的控制技术,可以实现精确的电流和电压控制,从而减少能耗和焊接过程中的损耗。储能焊机还...

机器人焊钳是一种自动化焊接设备,由机器人手臂和焊钳组成。焊钳是机器人焊接的关键部件,它的结构设计直接影响到焊接质量和效率。机器人焊钳的结构通常包括以下几个部分:1.夹持器:夹持器是焊钳的主要部件,用于夹持焊接工件。夹持器通常由两个夹爪组成,夹爪之间的距离可以根据焊接工件的大小进行调整。2.电极:电极...