-
山西西克QM30VT2批发

QM30VT2传感器通过与SureCross无线电台配接,实现了振动和温度数据的无线传输。这使得传感器可以在难以布线或需要移动监测的地方使用,较大提高了监测的灵活性和便利性。同时,通过连接...
查看详细 -
河南邦纳超声波传感器价格
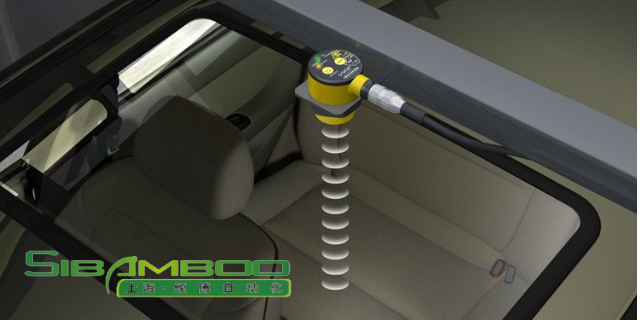
接收反射信号:超声波传感器内部有一个接收器,通常也是一个压电晶体,它能够接收到从物体表面反射回来的超声波信号。测量时间差:超声波传感器通过测量发射超声波信号和接收反射信号之间的时间差,来计...
查看详细 -
天津图像传感器供应商家

TOF(飞行时间)传感器:特点:TOF传感器通过测量光线从发射到接收所需的时间来计算物体与传感器之间的距离,具有快速、精确的距离测量能力,适用于需要进行距离测量或者实时三维成像的场景。应用...
查看详细 -
天津SICK光电传感器品牌
在户外使用光电传感器时,环境光干扰是一个常见的问题,为了有效防止环境光干扰,可以考虑以下几种方法:滤光片:在光电传感器上安装适当的滤光片,可以选择特定波长的滤光片来屏蔽掉其他波长的环境光,...
查看详细 -
江西国产光电传感器供应商家

连接方式:根据设备的安装和布线需求,选择导线引出型或接插件型的连接方式。光源类型:根据检测物体的颜色、材质和表面状态,选择合适的光源类型,如LED或激光,以确保传感器能够准确检测到目标物体...
查看详细 -
福建基恩士图像传感器哪家好
在不同的光照条件下,图像传感器需要采取一些措施来保证稳定的性能。以下是一些常见的方法:自动曝光控制:图像传感器通常配备有自动曝光控制功能,可以根据环境光线的强弱自动调整曝光时间和光圈大小,...
查看详细 -
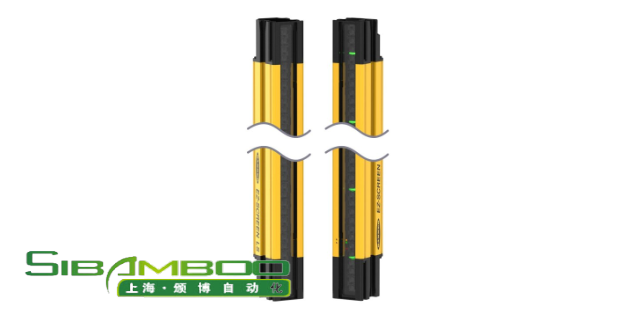
天津BANNER安全光栅销售

安全光栅在各种工业领域中都有较广的应用,特别是在需要保障人员安全的自动化生产线和机械设备中更为常见。以下是安全光栅在一些工业应用中较为常见的情况以及它们的主要作用:自动化生产线:在汽车制造...
查看详细 -
江西邦纳超声波传感器供应商家

多次采样和平均:为了减小测量误差,可以进行多次测量并取平均值。通过多次采样可以减小随机误差,提高测距的精度。环境校准:考虑到环境因素对超声波传播速度的影响,如温度、湿度等,可以进行环境校准...
查看详细 -
山东BANNER超声波传感器销售

在超声波传感器系统中,实现精确的测距和时间测量需要采取以下措施:硬件设计:构建一个包含单片机较小系统、超声波发射和接收电路、舵机方向控制电路等关键组件的硬件平台。这样的设计可以确保超声波信...
查看详细 -
湖北邦纳光电传感器联系方式

光电传感器的响应时间和分辨率是评估其性能的重要指标,它们对传感器的应用效果有直接影响。首先,响应时间是指从光信号出现到传感器产生电信号的时间。响应时间较短的传感器能够快速检测到光信号的变化...
查看详细 -
上海TOYO伺服模组

伺服模组与步进电机系统相比,具有以下优势和劣势:优势:高精度和高速度:伺服模组通常能够提供更高的精度和速度控制,适用于需要更高运动精度和速度的应用。实时反馈:伺服模组配备了反馈装置(如编码...
查看详细 -
湖北国产安全光栅
安全光栅的正确安装和调试对于确保其正常运行和有效性至关重要。以下是安全光栅安装和调试的一般步骤:选择安装位置:根据实际工作场景和安全需求,选择合适的安装位置。安全光栅应该覆盖所有可能的危险...
查看详细