-
 山东小体积光纤陀螺仪高性价比05.28
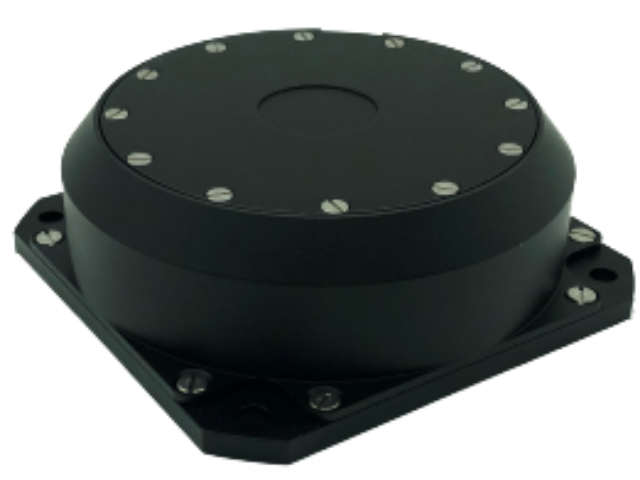
山东小体积光纤陀螺仪高性价比05.28光纤陀螺的工作原理是基于萨格纳克(Sagnac)效应。萨格纳克效应是相对惯性空间转动的闭环光路中所传播光的一种普遍的相关效应,即在同一闭合光路中从同一光源发出的两束特征相等的光,以相反的方向进行传播,...

-
 山东LINS-F3X60光纤陀螺仪惯性测量单元05.28
山东LINS-F3X60光纤陀螺仪惯性测量单元05.28在航空航天领域,高精度光纤陀螺仪发挥着举足轻重的作用。由于其高精度、高可靠性和抗干扰能力强的特点,光纤陀螺仪被普遍应用于卫星导航、导弹制导、飞机姿态控制、天线系统稳定等关键任务中。光纤陀螺仪能够提供准...
-
 山东LINS-F60光纤陀螺仪高性价比05.27
山东LINS-F60光纤陀螺仪高性价比05.27光纤陀螺仪的实现主要基于塞格尼克理论:当光束在一个环形的通道中行进时,若环形通道本身具有一个转动速度,那么光线沿着通道转动方向行进所需要的时间要比沿着这个通道转动相反的方向行进所需要的时间要多。也就是...
-
 上海LINS-G202惯性导航单元价格05.26
上海LINS-G202惯性导航单元价格05.26IMU全称Inertial Measurement Unit,惯性测量单元,主要用来检测和测量加速度与旋转运动的传感器。其原理是采用惯性定律实现的,这些传感器从超小型的的MEMS传感器,到测量精度非常...
-
青岛LINS354惯性导航单元05.25
在工业市场上,诸如震动分析、平台校正、一般运动控制之类的应用都需要高集成度和高可靠度的解决方案,而且在许多情况下检测元件是直接嵌入到现有设备中。此外,还必须提供足够的控制、校准和编程功能,使器件真正单...
-
 广州LINS688B惯性导航厂家价格05.25
广州LINS688B惯性导航厂家价格05.25在人形机器人领域,IMU技术可以帮助机器人在行走跨越障碍物等复杂动作中保持平衡和稳定性,以确保运动姿态的准确和流畅。 据公开资料显示,人形机器人中IMU的用量将达到2-4个,分别配置在头部、双足和胯...
-
 山东LINS300T惯性导航传感器厂家05.24
山东LINS300T惯性导航传感器厂家05.24根据所用陀螺仪的不同,惯性导航系统分为速率型捷联式惯性导航系统和位置型捷联式惯性导航系统。 前者用速率陀螺仪,输出瞬时平均角速度矢量信号;后者用自由陀螺仪,输出角位移信号。 捷联式惯性导航系统省去了平...
-
北京LINS688惯性导航厂家05.23
我国的惯导技术近年来已经取得了长足进步,液浮陀螺平台惯性导航系统、动力调谐陀螺四轴平台系统已相继应用于长征系列运载火箭。其他各类小型化捷联惯导、光纤陀螺惯导、 激光陀螺惯导以及匹配GPS修正的惯导装置...
-
 广州LINS688惯性导航模组05.22
广州LINS688惯性导航模组05.22VR设备 VR头戴式设备主要使用这些IMU传感器来跟踪你的头部位置,以改变它发出的视频信号。例如,当你向上看时,你的头部实际上是绕X轴旋转的,这将被放置在你的虚拟现实耳机中的IMU传感器的陀螺仪感应到...
-
广州IMU500惯性导航单元价格05.22
低精度MEMS惯性传感器作为消费电子类产品主要用在手机、GPS导航、游戏机、数码相机、音乐播放器、无线鼠标、PD、硬盘保护器、智能玩具、计步器、防盗系统。由于具有加速度测量、倾斜测量、振动测量甚至转动...
-
北京LINS-I500惯性导航模块厂家05.21
零偏不稳定性(Bias Instability) IMU传感器的零偏会随着时间发生漂移的现象被称为零偏不稳定性bias instability,也被称为flicker noise。零偏不稳定性通常会在...
-
青岛LINS-F50X光纤陀螺仪05.20
在重要惯性元件方面,我国从20世纪80年代初开始光纤陀螺的研制。相对于其它陀螺,由于光纤陀螺的生产工艺简单并且存在技术潜力和优势,在需求牵引下已经有越来越多的单位投身到研制光纤陀螺的队伍中,具备可持续...