堆垛机的货叉伸缩速度是其重要的性能参数之一,以下是关于堆垛机货叉伸缩速度的详细介绍:常见速度范围一般情况下,堆垛机货叉的伸缩速度在5-40米/分钟之间。常见的普通堆垛机货叉空载伸缩速度约为20-30米/分钟,带载伸缩速度约为10-20米/分钟。在一些较为先进或高性能的堆垛机中,货叉伸缩速度相对高可达40米/分钟左右。对作业效率的影响出入库效率:货叉伸缩速度直接关系到堆垛机每次存取货物的时间。伸缩速度越快,堆垛机完成一次货物存取的周期就越短,单位时间内的出入库数量就越多,从而提高了整个仓库的物流周转效率。例如,在一个繁忙的电商仓库中,快速的货叉伸缩速度能够使堆垛机在相同时间内处理更多的订单货物,减少货物等待时间.仓库整体作业节拍:堆垛机的货叉伸缩速度需要与运行速度、升降速度等其他运动参数相匹配,以确保整个堆垛机系统的高效协同作业。如果货叉伸缩速度过慢,即使运行速度和升降速度较快,也会导致堆垛机在货位前等待货叉伸缩的时间过长,从而影响整个仓库作业的节拍和连贯性堆垛机具有频繁的应用前景,提高仓库的存储效率、降低人力成本、优化库存管理,并适应各种特殊环境的需求。哪个巷道堆垛机方法

堆垛机的行走驱动装置工作原理运行控制:行走驱动装置的速度控制是通过改变电机的转速来实现的。在电气控制系统中,通过变频器等设备可以对电机的输入频率进行调节,从而改变电机的转速。例如,当需要堆垛机快速移动到较远的货架位置时,可以提高电机的转速,使堆垛机以较高的速度行走;而当接近目标货架位置时,为了精确停车,会降低电机转速,实现慢速接近。为了确保堆垛机行走的准确性和安全性,还配备了制动装置。常见的制动装置是电磁制动器,它安装在电机或减速器的输出轴上。当电机正常运转时,电磁制动器处于通电松开状态,不影响动力的传递;当需要停车时,如接收到停止信号或者遇到紧急情况,电磁制动器断电,通过弹簧力等作用使制动器抱紧制动轮,产生制动力矩,使堆垛机迅速停止。同时,在堆垛机的轨道两端还设有机械限位装置,当电气制动系统失效时,机械限位装置可以防止堆垛机冲出轨道。技术巷道堆垛机产品介绍堆垛机平稳工作的更高水平运行速度可以达到300m/min,这很大提高了工作效率。
单伸位堆垛机与双伸位堆垛机的区别作业效率和灵活性单伸位堆垛机:作业效率相对较为稳定,在存取单一侧面的货物时,由于其结构简单,动作较为直接,运行速度可以相对较快。但是如果需要频繁更换存取货物的货架侧面(例如由于货物出入库的位置分布变化),单伸位堆垛机就需要花费更多的时间在通道中运行调整位置。它比较适合货物出入库位置相对固定,且对存储密度要求不是特别高的仓库环境。双伸位堆垛机:具有更高的灵活性,能够根据仓库管理系统的指令,快速地从货架的两侧进行货物存取。不过,双伸位货叉的结构相对复杂,每次操作货叉的伸缩时间可能会比单伸位货叉略长,而且双伸位堆垛机的控制系统也更为复杂,在进行一些复杂的货物存取任务时,可能需要更多的时间来规划路径和操作货叉。但是总体而言,在处理不同出入库任务的综合效率上,双伸位堆垛机在合适的场景下更具优势。
堆垛机结构主要有:水平行走结构、提升机构、取放货机构、电气柜和蓄电池等部分组成。堆垛机本体具有足够的刚度和强度,整个结构部分布局紧凑、强度高、刚性好。水平行走机构是有轨巷道堆垛机的重要组成部分,它主要由下横梁、行走电机、主动车轮、被动车轮、水平导向轮、安全夹钩等组成。基本功能是通过减速电机驱动主动行走轮组在地轨上运动,以一定的速度安全可靠地完成巷道堆垛机沿巷道方向的水平行走运动。下横梁导向轮通过支架固定在下横梁上,使有轨巷道堆垛机水平运行时,能够沿着地轨行走而不跑偏,起导向的作用。安全夹钩可保证堆垛机不致倾翻。堆垛机通过行走电机驱动车轮在下导轨上做水平行走,同时由提升电机通过钢丝绳带动载货台做垂直升降运动。
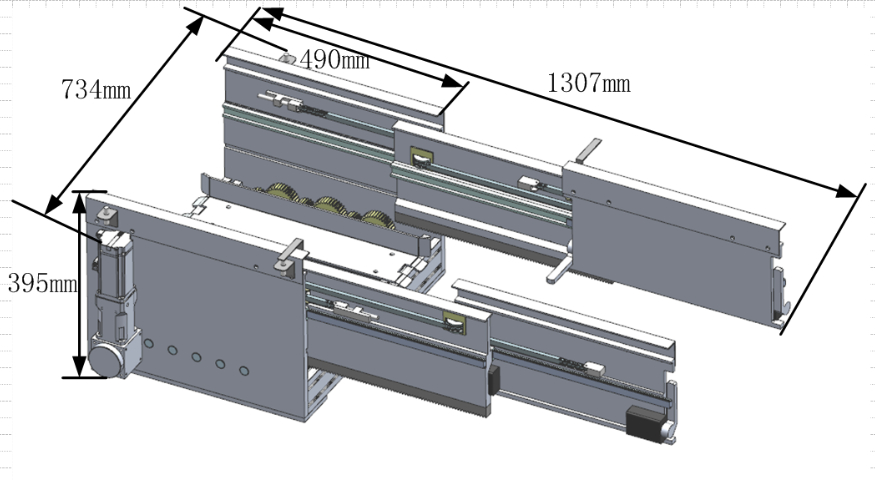
堆垛机结构主要有:水平行走结构、提升机构、取放货机构、电气柜和蓄电池等部分组成。堆垛机本体具有足够的刚度和强度,整个结构部分布局紧凑、强度高、刚性好。升机构用于驱动载货台做升降运动。提升机构主要由提升减速电机、立柱、上横梁、同步带、缓冲器、载货台等部分组成见下图。提升电机减速器机构通过支架用螺栓固定在立柱下端的下横梁上,减速器输出轴驱动同步带运动,从而带动载货台上下垂直运动。上横梁下方设有一组聚氨酯缓冲器,用于减小载货台在相对高位置对上横梁的冲击,下横梁上方也设有一组聚氨酯缓冲器,用于减小载货台在相对低位置对下横梁的冲击。堆垛机的升降机构实现堆垛机的垂直方向运动。双伸位堆垛机巷道堆垛机定制价格
尽管堆垛机配备了多种安全保护装置,但在实际应用中仍需加强安全管理和监控。哪个巷道堆垛机方法
堆垛机仪器仪表要求:a)视线和仪表盘面应垂直。b)照明不能在仪表盘的玻璃上形成反射,应该把光源安装在使仪表容易看清的位置。c)重要仪表或需要频繁观察的仪表应安装在容易看到的地方。、d)仪表盘数值精度,应使操作者能很快读出,且读出的单位能直接应用,原则上不要再进行换。e)压力、温度仪表应有上、下限和正常值的标记。f)仪表刻度的增加方向,原则上是由左到右,由下到上。g)操作器和有关仪表应相互对应,按操作程序布置。h)操作器的动作方向原则上应和仪表的指针的动作方向一致。i)如操作器会对仪表发生影响,则应把仪表装在不受干扰的地方。如操作器和仪表装的很近,要注意使操作人员的手部不易碰到开关按钮。j)为防止主要机器误操作应设置联锁回路。k)设备验收时提供设备上使用仪表、仪器的合格证和随机附带的说明书。哪个巷道堆垛机方法