堆垛机立库和穿梭车立库是自动化立体仓库的两种主流解决方案,它们在结构、效率、成本、适用场景等方面各有优缺点。以下是两者的详细对比:2.穿梭车立库(以四向穿梭车为例)优点:高存储密度:四向穿梭车可实现密集存储,存储密度比堆垛机立库提升20%以上。灵活性强:四向穿梭车可在货架内前后左右移动,不受固定巷道限制,适应不规则仓库布局。成本较低:穿梭车单车成本约为堆垛机的1/5,且可按需配置数量,减少资产浪费。高运行效率:多车协同作业,整体效率比堆垛机高30%以上。维护便捷:穿梭车单独运行,一台故障不影响其他设备,维护成本低。缺点:载重限制:四向穿梭车额定载重一般在2吨以内,不适合重型货物存储。高度限制:通常适用于20米以下的仓库,超高仓库需结合提升机使用。初期调度复杂:多车协同需依赖智能调度系统(WMS/WCS),对软件要求较高。 在加工、制造等行业中,有轨巷道堆垛机可以高效地存储和搬运原材料、半成品及成品,提高生产效率。机械行业巷道堆垛机便捷

堆垛机是立体仓库十分重要的起重运输设备,是随立体仓库发展起来的特用起重机械设备。运用此种设备的仓库高度可达40多米,大多在10-25米。堆垛机的主要用途是在立体仓库的巷道间反复穿梭运行,将位于巷道口的货物存入货格,或者将货格中的货物取出运送到巷道口。此种设备只能在仓库内运行,还需配备其他设备使货物出入库。堆垛机减轻了工人的劳动强度,提高了仓库的利用率及周转率,具有以下特点:(1)堆垛机有一系列的连锁保护措施。由于工作场地窄小,稍不准确就会造成严重后果,所以,堆垛机上配有一系列机械和电气保护措施。(2)堆垛机安有特殊的取物装置,如货叉和机械手等。(3)堆垛机的电力控制系统具有平稳、快速和准确的特点,能保证货物快速、准确、安全地取出和存入。(4)堆垛机的整机结构高而窄,适用于在巷道内运行。 江西巷道堆垛机作业流程拣选型堆垛机:操作人员从货架内的托盘单元或货物单元中取少量货物,进行出库作业。

高密度仓库可选四向穿梭车+提升机系统(密集存)或 双立柱堆垛机立体库(重载高)。前者通过小车在平面四向行驶,取消固定巷道,空间利用率再提升20 %以上,且任一车辆故障可由其余车绕行替代,柔性高;后者以40 m以上双立柱堆垛机为主要设备,单巷载重可达5 t,适合重货、高频、低温冷链。相比之下,叉车受限于转弯半径与人工效率,在≤2 m窄巷及>10 m高层场景无法胜任。因此,若追求密度与弹性扩容,选四向穿梭车;若重货、高层、低温并存,选超高堆垛机;两者均远胜传统叉车。
堆垛机通过三维运动完成货物存取:
水平行走:电机驱动车轮沿轨道移动至目标货架巷道;
垂直升降:提升电机带动载货台调整至对应货格高度;
货叉伸缩:货叉伸入货格取放货物,并通过光电或条码识别系统定位。多巷道堆垛机还可通过转轨装置切换不同巷道,如四巷道系统中通过弯轨连接实现灵活调度。
按不同标准可分为以下几类:
结构类型:
单立柱:结构紧凑,适用于轻载(<100kg)、高速场景(如电子、医药行业)。
双立柱:稳定性强,适用于重载(>200kg)、高货架(>10m)场景(如汽车、化工行业)。
支撑方式:地面支承型:常见,适用于各类仓库;
悬挂型和货架支承型:适用于小型仓库,灵活性高但应用较少。
用途:单元型:以托盘或货箱为单位作业,自动化程度高;拣选型:配备司机室,支持“人到货”拣选。 单立柱堆垛机:由一根立柱和下横梁组成,整机重量轻,刚性差,适用于起重量和起升高度较小的小型立体仓库。
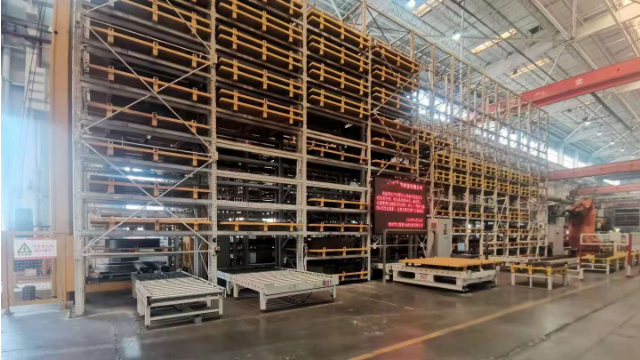
堆垛机立体仓库,又称自动化立体仓库,是现代物流仓储领域的重要发展方向,它集成了先进的机械结构、控制系统和管理技术,实现了货物的自动化存储、拣选、搬运等工作。该仓库主要由堆垛机、货架、输送系统、通讯系统、信息识别系统以及计算机控制及管理系统等部分组成。堆垛机作为立体仓库中的重要设备,通过三维运动(水平行走、垂直升降和货叉伸缩)精确地将货物存放到指定货位或从指定货位取出,其构造复杂而精密,包括行走机构、升降机构、货叉机构等关键部件,以及底盘、立柱、横梁等主体结构部分。货架则作为存储载体,采用高层设计,大幅度提高了仓库的存储密度。输送系统负责将货物从入库口输送到指定货架位置,或从货架位置输送到出库口。通讯系统确保堆垛机与计算机系统的实时通讯,信息识别系统则用于识别货物信息,确保堆垛机准确存取货物。计算机控制及管理系统是立体仓库的大脑,实现货物的自动化管理和与外部生产环节的连接巷道堆垛机是现代物流仓储设备中的重要组成部分,主要用于自动化立体仓库中货物的存取作业。江西巷道堆垛机作业流程
堆垛机巷道宽2-3 m,空间利用率受限。机械行业巷道堆垛机便捷
巷道堆垛机在仓储作业中可能因设备故障、环境异常或人为操作失误等突发情况导致安全风险。以下是针对不同突发场景的应急处理方案,结合设备特性、操作规范及安全标准进行系统化梳理:三、系统协同类突发情况处理1.通信中断导致任务停滞场景:堆垛机与WMS系统通信中断,无法接收任务指令。处理步骤:切换备用网络:若采用双网络架构,立即切换至备用网络。手动操作:通过本地控制面板手动控制堆垛机完成当前任务。排查故障:检查通信模块、网线连接及系统日志,修复故障后恢复自动运行。2.调度***导致设备碰撞场景:多台堆垛机因调度系统故障导致路径重叠。处理步骤:立即停机:按下所有堆垛机的急停按钮,防止碰撞。隔离设备:将***区域的堆垛机移至安全位置。重启调度系统:检查WCS/WMS系统,修复软件漏洞或网络问题。 机械行业巷道堆垛机便捷