本发明针对现有技术中的不足,提供了一种晶圆搬运机械手,本发明的机械手在传送过程中晶片中心始终保证直线运动,且角度不会发生改变。从而提高机械手整体刚度和承重能力,同时提高了重复定位精度。本发明结构合理性能稳定,维护方便,多功能集一身,可满足多种工艺设备要求,适用于各种半导体设备。 ...
晶圆运送机械吸臂基本参数
- 产地
- 深圳
- 品牌
- 德澳美
- 型号
- 齐全
- 是否定制
- 是
晶圆运送机械吸臂企业商机
输送半导体晶圆的机械手通常具有两个以上的自由度。这种机械手典型地由两个连杆和手部构成。在本说明书中,将两个连杆称作上臂连杆和前臂连杆。典型地,上臂连杆的一端连结于电机的输出轴,上臂连杆的另一端连结于前臂连杆的一端。而且,前臂连杆的另一端连结于手部。上臂连杆和前臂连杆经由关节而连结。前臂连杆和手部也经由关节而连结。在各个关节处安装有轴承,以便使连杆顺畅地旋转。在输送半导体晶圆的机械手中,为了不污染传送室内而屏蔽(shield)安装于关节的轴承。直角坐标系机械手臂,球坐标系机械手臂,极坐标机械手臂.苏州进口晶圆运送机械吸臂经销批发

出了通用二自由度空间模块(TODOM)的概念,并以通用TODOM作为空间机械臂的构造模块。TO-DOM由两个旋转模块及一个连接模块共三个基本模块组成。根据空间机械臂的具体构型需要,将TODOM的三个基本模块之间的机械接口进行专门设计,即可配置成确定构型的二自由度关节。由这样数个不同构型的二自由度关节可以组装出具有偶数个自由度的空间机器臂。采用一体化概念设计的TODOM减小了关节的质量与体积,提高了系统的可靠性。通过对由TODOM构成的一套二自由度关节进行的试验初步验证了TODOM设计概念的合理性及可行性。福建新款晶圆运送机械吸臂公司为此,手臂一般都采用刚性较好的导向杆来加大手臂的刚度.
冲床行业机械臂又名冲床行业机械手、冲床冲压机械手,它是用于冲床行业专门用的机械臂,冲床冲压机械手能按照预选程序自动完成几个规定的动作,实现物体的自动夹取和运送。在冲压生产中,它不*用于一台压力机上完成上下料工作,实现单机自动化,也可以用在由若干台压力机组成的流水生产线上,实现各压力机之间工件的自动传递,形成自动冲压生产线。由于机械手能方便地改变工作程序,因而在经常变换产品品种的中小件冲压生产中,对于实现生产自动化更具有重要意义。冲床冲压机械手由执行机构、驱动机构和电气控制系统等组成。
多功能一体化机械臂,包括机械臂主体,所述机械臂主体由设置在该机械臂主体底部的底座、设置在底座顶部的后臂及设置在后臂顶部的前臂构成的,该种多功能一体化机械臂,改进了原有产品的缺点,本实用新型多功能一体化机械臂具有成本费用较低、占地面积较小和驱动充足的特点,本机械臂*由底座、前臂和后臂构成的,实现了占地面积小的特点,且在生产过程中由于体积较小,厂家生产成本费较低,同时工人在使用时,移动较为方便,设有的安全离合器、液压器和液压室,实现了本新型机械臂驱动充足的特点,在使用过程中完全依靠程序芯片控制,液压器液压精细不会对于半导体制造应用来说,常用的机械手臂是用来搬送晶片.

基因决定”——生长方法导致若要回答这个问题,首先要说一个大约有100余年历史的原因。。。1918年,前苏联科学家切克劳斯基(Czochralski)建立起来一种晶体生长方法——直拉式晶体生长方法,简称CZ法。硅晶圆的制造可以归纳为三个基本步骤:硅提炼及提纯、单晶硅生长、晶圆成型。首先是硅砂的提纯及熔炼。这个阶段主要是通过溶解、提纯、蒸馏等一系列措施得到多晶硅。接下来是单晶硅生长工艺。就是从硅熔体中生长出单晶硅。高纯度的多晶硅放在石英坩埚中,在保护性气氛中高温加热使其熔化。使用一颗小的籽晶缓慢地从旋转着的熔体中缓慢上升,即可垂直拉制出大直径的单晶硅锭。***一步是晶圆成型。单晶硅锭一般呈圆柱型,直径从3英寸到十几英寸不等。硅锭经过切片、抛光之后,就得到了单晶硅圆片,也即晶圆。 机械手臂应用场景多在制造业。福建新款晶圆运送机械吸臂公司
直角坐标系机械手臂有三个主自由度。苏州进口晶圆运送机械吸臂经销批发
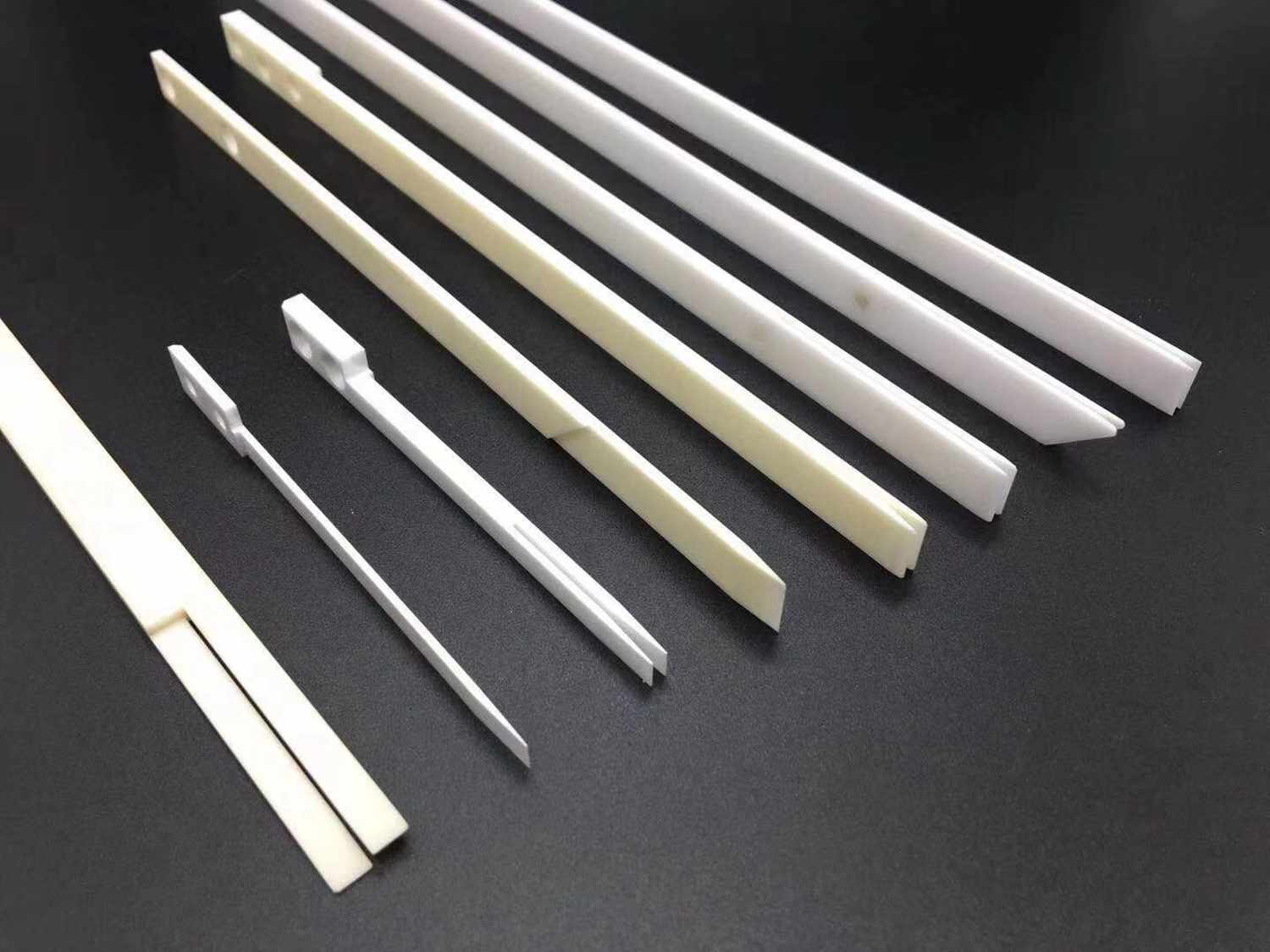
晶圆运送机械吸臂主要由以下几个部分组成:
吸盘:用于吸附晶圆,通常采用真空吸附原理。吸盘材料应具有耐磨、耐腐蚀、低粒子产生等特性,以保证晶圆表面不受污染。
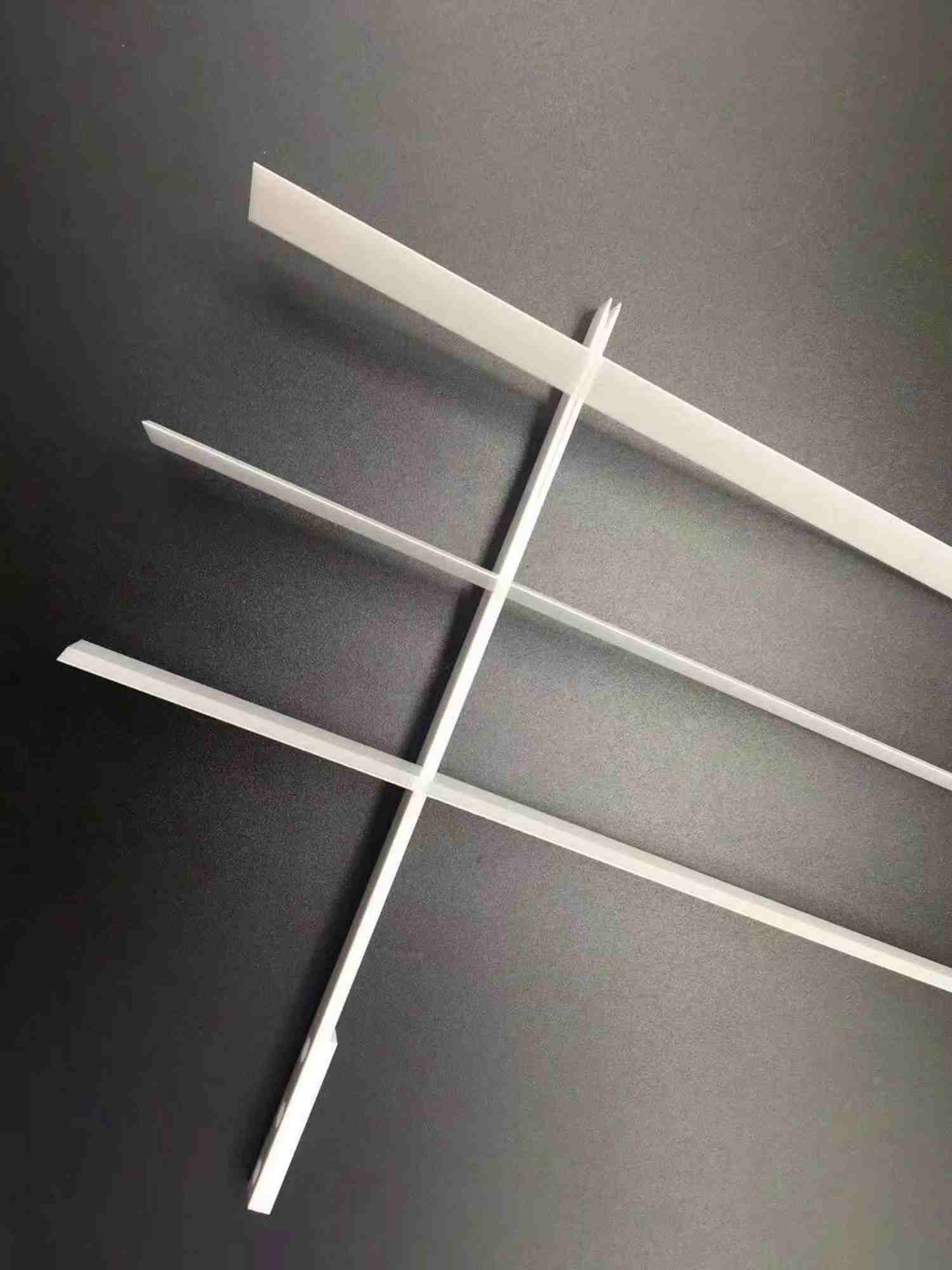
机械臂:用于支撑和移动吸盘,实现晶圆在不同工艺设备间的传送。机械臂应具有高精度、高稳定性和高刚性等特点,以确保晶圆在传送过程中的精确定位和平稳运输。
传动系统:为机械臂提供动力,实现吸臂的伸缩、旋转等动作。传动系统通常采用电机、减速器、传动带等部件组成,确保吸臂运动的准确性和稳定性。
控制系统:负责控制机械臂的运动轨迹、速度和加速度等参数。控制系统一般采用先进的伺服控制技术和高精度传感器,实现吸臂的高精度定位和稳定运行。 苏州进口晶圆运送机械吸臂经销批发
深圳市德澳美科技有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在广东省等地区的机械及行业设备中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,**协力把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来深圳市德澳美精密制造供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!
与晶圆运送机械吸臂相关的文章

山东进口晶圆运送机械吸臂设计
- 潮州官方晶圆运送机械吸臂价格 2026-03-08
- 苏州官方晶圆运送机械吸臂怎么联系 2026-03-07
- 福建原装晶圆运送机械吸臂上门服务 2026-03-06
- 浙江正规晶圆运送机械吸臂价格便宜 2026-03-05
- 徐州正规晶圆运送机械吸臂维修电话 2026-03-04
- 湛江晶圆运送机械吸臂哪个牌子好 2026-03-02
- 江苏进口晶圆运送机械吸臂维修 2026-03-02
- 湛江进口晶圆运送机械吸臂生产厂家 2026-03-02
- 惠州官方晶圆运送机械吸臂维修电话 2026-02-28
- 揭阳正规晶圆运送机械吸臂价格信息 2026-02-28
- 苏州新款晶圆运送机械吸臂企业 2026-02-27
- 阳江官方晶圆运送机械吸臂价格信息 2026-02-27
与晶圆运送机械吸臂相关的产品



与晶圆运送机械吸臂相关的新闻
-
茂名原装晶圆运送机械吸臂设计 2026-02-13 05:00:46目前,直拉法是生长晶圆**常用的方法了,除了直拉法之外,常用的方法还有区熔法。区熔法,简称Fz法。1939年,在贝尔实验室工作的W·G·Pfann较早萌生了“区域匀平”的念头,后来在亨利·休勒、丹·多西等人的协助下,生长出了高纯度的锗以及硅单晶,并获得了**。这种方法是利用热能在半导体多晶...
-
南京进口晶圆运送机械吸臂价格 2026-02-12 02:00:27对于晶圆状态的检测,主要包括晶圆的存在检测、位置偏差检测和表面质量检测等。通过光电传感器或电容传感器可以快速检测晶圆是否正确放置在吸臂上,以及在搬运过程中是否发生位移。表面质量检测传感器则可以实时监测晶圆表面是否有划痕、颗粒污染等缺陷,一旦发现异常情况,及时发出警报并采取相应措施,以保证晶圆的质量不...
-
江西进口晶圆运送机械吸臂上门服务 2026-02-12 05:00:40晶圆运送机械吸臂是半导体制造过程中至关重要的设备组件,它专门用于精确、可靠地搬运晶圆。晶圆作为半导体芯片的基础材料,其制造过程对环境和操作的精度要求极高,任何微小的污染或损伤都可能导致芯片性能下降甚至报废。机械吸臂在这个过程中扮演着“晶圆搬运工”的关键角色,确保晶圆在不同工序和设备之间安全、准确地传...
-
江门原装晶圆运送机械吸臂生产厂家 2026-02-11 01:01:00工业机械臂定义为“其操作机是自动控制的,可重复编程、多用途,并可以对3个以上轴进行编程。它可以是固定式或者移动式。在工业自动化应用中使用”。操作机又定义为“是一种机器,其机构通常由一系列相互铰接或相对滑动的构件所组成。它通常有几个自由度,用以抓取或移动物体(工具或工件)。”所以对工业机械臂可能理...
与晶圆运送机械吸臂相关的问题
新闻资讯
产品推荐
-
苏州官方晶圆运送机械吸臂怎么联系
2026-03-07 -

福建原装晶圆运送机械吸臂上门服务
2026-03-06 -

湛江进口微孔陶瓷真空吸盘推广
2026-03-06 -

汕尾官方微孔陶瓷真空吸盘批发
2026-03-06 -

常州进口精密结构陶瓷维修
2026-03-05 -

茂名正规精密结构陶瓷
2026-03-05 -

浙江正规晶圆运送机械吸臂价格便宜
2026-03-05 -

阳江进口精密结构陶瓷上门服务
2026-03-04 -

福建新款微孔陶瓷真空吸盘哪个牌子好
2026-03-04