直线电机有它独特的应用,是旋转电机所不能替代的。但是并不是任何场合使用直线电机都能取得良好效果。为此必须首先了解直线电机的选型原则,以便能恰到好处地应用它。其选型原则有以下几个方面:一、选择合适的运动速度。直线电机的运动速度与同步速度有关,而同步速度又正比于极距。因此极距的选择范围决定了运动速度的选择范围。极距太小会降低槽的利用率,增大槽漏抗和减小品质因数,从而降低电动机的效率和功率因数。极距的下限通常取3cm。极距可以没有上限,但当电机的输出功率一定时,初级铁芯的纵向长度是有限的;同时为了减小纵向边缘效应,电动机的极数不能太少,故极距不可能太大。二、要有合适的推力。旋转电机可以适应很大的推力范围。将旋转电机配上不同的变速箱,可以得到不同的转速和转矩。在低速的场合,转矩可以扩大几十到几百倍,以至于用一个很小的旋转电机就可以推动一个很大的负载,当然功率是守恒的。直线电机则不同,它无法用变速箱改变速度和推力,因此它的推力无法扩大。要得到比较大的推力,只有依靠加大电动机的尺寸。这有时是不经济的。一般来说,在工业应用中,直线电机适用于推动轻载。直线电机厂家可定制!南京4轴直线电机源头
直线电机的缺点;1、效率和功率因数较低:管型直线电机的效率和功率因数比同容量的旋转电机要低,特别在低速时。这是由以下原因引起的:它的电磁气隙与极距的比值通常较大,所需的磁化电流也较大,使损耗增加;初级铁芯两端开断,产生纵向边缘效应,从而引起波形畸变等问题,其结果也导致损耗增加。2、起动推力易受到电压波动的影响,在低速高滑差情况下,往往要求有比较恒定的起动推力,但当电源电压有波动时,起动推力变化很大,因此需要电源电压比较稳定。3、运行速度范围受到电机极距的限制;当电源频率一定时,电机的运行速度在很大程度上取决于电机的极距,一般极距不能太大,也不能太小,所以它的速度也被限制在某一合适的范围内。在要求低速的传动系统中,就往往需要增加变频设备。4、馈电比较复杂,对于动初级的直线电机,在速度较高或行程较长时,馈电比较复杂。5、散热较困难管型直线电机的散热条件要比扁平型直线电机差,这就限制了电机所允许的电参数,从而限制了电机的推力,因而圆筒型直线电机不适合大功率电机。常州搬运机器人直线电机批发江苏直线电机采购就找苏州VEILS!
为提高直线电机平台的寿命,必须要注重零部件的保养防护,光栅尺作为影响直线电机精度的一个重要部件,必须对光栅尺及其保养有所了解,下面就跟小编一起了解一下吧!光栅尺是一种高精度的直线位移传感器,由光源、聚光镜、标尺光栅、指示光栅和硅光电池等光敏元件组成。光栅尺是数控机床闭环控制系统中用得多的测量装置。光栅尺通常由两块长短不同的光栅尺配套使用,其中长的称为主光栅或标尺光栅,其安装在机床移动部件上,要求雨行程等长,短的一块称为指示光栅,指示光栅和光源、透镜、光敏元件安装在草庙头中,安装在机床的固定部件上。
圆柱形动磁体直线电机动子是圆柱形结构。沿固定着磁场的圆柱体运动。这种电机是初发现的商业应用但是不能使用于要求节省空间的平板式和U型槽式直线电机的场合。圆柱形动磁体直线电机的磁路与动磁执行器相似。区别在于线圈可以复制以增加行程。典型的线圈绕组是三相组成的,使用霍尔装置实现无刷换相。推力线圈是圆柱形的,沿磁棒上下运动。这种结构不适合对磁通泄漏敏感的应用。必须小心操作保证手指不卡在磁棒和有吸引力的侧面之间。管状直线电机设计的一个潜在的问题出现在,当行程增加,由于电机是完全圆柱的而且沿着磁棒上下运动,***的支撑点在两端。保证磁棒的径向偏差不至于导致磁体接触推力线圈的长度总会有限制。苏州直线电机采购就找苏州尚恩格!

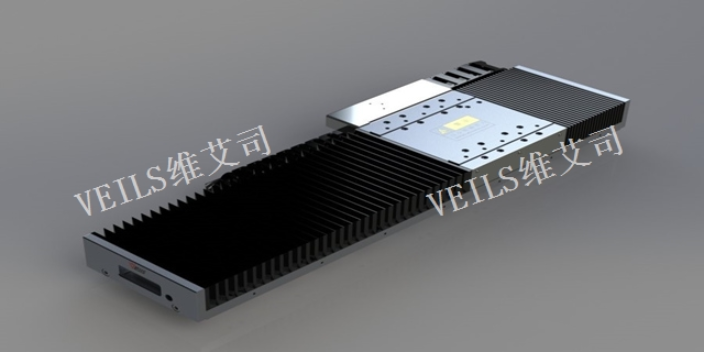
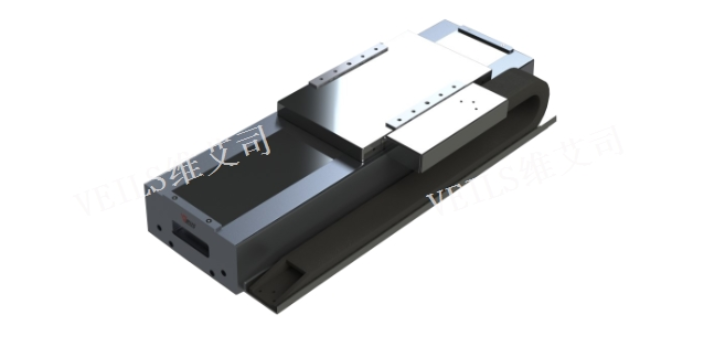
1.高推力:比如25系列比较大推力可以做到202N;2.高加速度:比较大加速度可以做到10G;3.宽广的调速范围:可以实现0.1mm/s-4000mm/s;4.零齿槽效应、无涡流损耗、无端部效应、可以轻松实现亚微米的高定位精度;5.简单的结构,电磁力直接实现线性运动而不需要凸轮、齿轮、传送带或其它机械装置;6.极少的安装组件、无径向磁作用力、大气隙、免维护,非接触驱动,不会产生象滚珠丝杆的间隙而造成的精度误差,是直线运动的一种高性价比解决方案;7.高效率、超静音、360散热设计、无需强制冷却;8.全磁密封紧凑型设计,可用于水下及真空等苛刻场合,适用于恶劣的工业环境(选配);9.低惯量、直驱、高稳定性、调整简单,可以实现完全可控的运动曲线和行程。VEILS(维艾司)成立于2014年,是一家集研发、生产、销售、售后为一体的综合性研发生产型企业以生产高科技的滚动功能部件为主要产品,秉承:“品质唯上、客户至上”的精神,为客户提供的产品和服务!致力于打造工业4.0供应商。直线电机选购就选苏州VEILS!福建冲压直线电机源头
直线电机国产大品牌维艾司!南京4轴直线电机源头
对直线电机控制技术的研究基本上可以分为三个方面:一是传统控制技术,二是现代控制技术,三是智能控制技术。传统的控制技术如PID反馈控制、解耦控制等在交流伺服系统中得到了***的应用。其中PID控制蕴涵动态控制过程中的信息,具有较强的鲁棒性,是交流伺服电机驱动系统中基本的控制方式。为了提高控制效果,往往采用解耦控制和矢量控制技术。在对象模型确定、不变化且是线性的以及操作条件、运行环境是确定不变的条件下,采用传统控制技术是简单有效的。但是在高精度微进给的高性能场合,就必须考虑对象结构与参数的变化。各种非线性的影响,运行环境的改变及环境干扰等时变和不确定因素,才能得到满意的控制效果。因此,现代控制技术在直线伺服电机控制的研究中引起了很大的重视。常用控制方法有:自适应控制、滑模变结构控制、鲁棒控制及智能控制。主要是将模糊逻辑、神经网络与PID、H∞控制等现有的成熟的控制方法相结合,取长补短,以获得更好的控制性能。南京4轴直线电机源头