- 品牌
- 中科图测
- 型号
- ziki-M
- 类型
- 图像/视频位移计
- 测量精度
- ±0.02mm(距离1m);±0.1mm(距离10m);±0
- 工作温度
- -30℃至+60℃;
- 用途
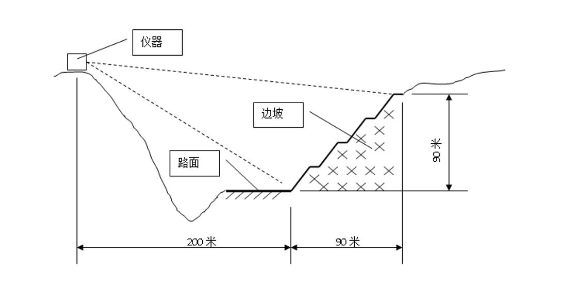
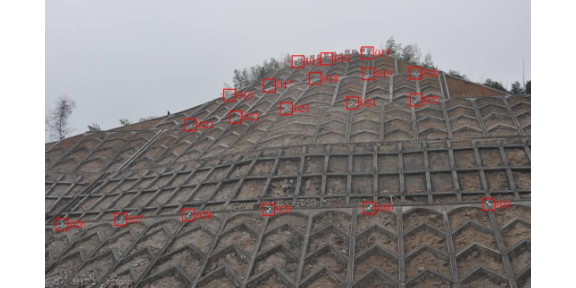
- 桥梁、隧道、大坝、护坡、山体以及建筑物等结构位移的长期监测
- 规格
- ziki-M
- 外形尺寸
- 220*120*90
- 重量
- 1
- 厂家
- 中科图测
- 产地
- 成都
- 监测距离
- 2m-500m
- 同时监测点数
- 100
- 相机分辨率
- 30万-200万
- 采集频率
- 1-800Hz
- 供电方式
- 市电交流220V /太阳能
- 靶标类型
- 有源靶标/无源靶标
- 主机功耗
- 15W
- 防护等级
- IP65
- 传输方式
- 支持有线传输、4G/5G传输
相机位移计是一种用于测量相机在空间中的位移和姿态变化的设备。它可以通过测量相机的位置和方向的变化来提供准确的位移和姿态信息。相机位移计在许多应用领域中都有广泛的应用,下面是一些常见的应用领域:机器人导航和定位:相机位移计可以用于机器人导航和定位系统中,帮助机器人准确地感知和理解周围环境的变化。它可以提供机器人的位置和方向信息,使机器人能够在复杂的环境中进行准确的导航和定位。虚拟现实和增强现实:相机位移计可以用于虚拟现实和增强现实应用中,帮助跟踪用户的头部和眼睛的运动,从而实现更加沉浸式和交互式的虚拟现实和增强现实体验。 位移计的测量结果可以用于验证模型和理论,优化设计和改进产品性能。主梁位移计分类
在使用位移计时,可能会遇到一些常见问题。以下是一些可能的问题及其解决方法:仪器读数不稳定:位移计读数波动较大,无法得到准确的测量结果。可能的原因包括仪器故障、环境干扰、测量对象的振动等。解决方法包括检查仪器是否正常工作、减小环境干扰、稳定测量对象等。仪器校准问题:位移计需要定期进行校准,以确保测量结果的准确性。如果仪器长时间未进行校准,可能会导致测量误差增大。解决方法是按照仪器说明书进行校准,或者联系专业技术人员进行校准。 非接触位移计分类位移计可以通过连接到计算机或数据记录器来实现数据记录和分析。
相机位移计是一种用于测量相机在空间中的位移和姿态变化的设备。它通常由多个传感器和计算单元组成,能够实时地监测相机的位置和方向,并将这些数据用于各种应用,如虚拟现实、增强现实、机器人导航等。相机位移计的工作原理通常基于传感器技术,包括惯性测量单元(IMU)、全局定位系统(GPS)、视觉传感器等。这些传感器能够感知相机的加速度、角速度、方向等信息,并将其转化为数字信号,供计算单元进行处理。在相机位移计中,IMU是蕞常用的传感器之一。它由加速度计和陀螺仪组成,能够测量相机的线性加速度和角速度。通过积分这些测量值,可以得到相机的速度和位移。然而,由于积分的误差会随着时间的推移而累积,所以IMU通常需要与其他传感器结合使用,以提高测量的准确性和稳定性。
电容式位移计是一种利用电容变化来测量位移的装置。当物体发生位移时,电容器的电容值会相应地改变,进而改变电路中的电流或电压。通过测量电流或电压的变化,可以获取物体的位移信息。而电感式位移计则是利用电感变化来测量位移。当物体发生位移时,电感器的电感值会相应地改变,进而改变电路中的电流或电压。通过测量电流或电压的变化,可以得到物体的位移信息。需要注意的是,位移计输出的信号是模拟信号,需要经过模数转换器(ADC)转换为数字信号,才能进行处理和分析。模数转换器将模拟信号转换为数字信号,使得位移计的输出可以被数字系统接收和处理。 相机位移计的精度如何?

位移计的测量原理有多种,以下是几种常见的位移计测量原理的介绍:光学位移计:光学位移计利用光学原理来测量位移。它由光源、光学传感器和测量物体组成。光源发出光线,经过物体反射后被光学传感器接收。通过测量光线的强度、相位或干涉等参数的变化,可以确定物体的位移量。
电阻式位移计:电阻式位移计利用电阻的变化来测量位移。它由电阻元件和测量电路组成。当物体发生位移时,电阻元件的长度或截面积会发生变化,导致电阻值的变化。测量电路可以通过测量电阻值的变化来确定物体的位移量。
压电位移计:压电位移计利用压电效应来测量位移。压电材料具有特殊的电荷分布结构,当施加力或压力时,会产生电荷的不均匀分布,从而产生电势差。通过测量电势差的变化,可以确定物体的位移量。
拉线位移计:拉线位移计利用拉线的伸缩来测量位移。它由固定的参考点、可移动的测量点和连接两者的拉线组成。当物体发生位移时,拉线会伸缩,导致测量点相对于参考点的位置变化。通过测量拉线的伸缩量,可以确定物体的位移量。 位移计的精度和灵敏度取决于其设计和制造质量。公路边坡位移计测量原理
相机位移计如何进行校准?主梁位移计分类
位移计通常输出模拟信号,主要是电压信号或电流信号。它是一种用于测量物体的位移或变形的传感器,能够将物体的位移转换为相应的电信号输出。常见的位移计包括电阻式位移计、电容式位移计和电感式位移计等。这些位移计的工作原理不同,但都能将位移转化为电信号输出。其中,电阻式位移计是最常见的一种,它通过测量电阻的变化来测量位移。当物体发生位移时,位移计中的电阻值会相应变化,从而改变电路中的电流或电压。通过测量电流或电压的变化,就可以获得物体的位移信息。 主梁位移计分类

利用图像位移计测量振动加速度需通过目标点在连续图像中的位移变化来实现。以下是一种可能的操作流程:1.安装目标点:在振动目标物体表面上安装一个反光点或者其他能够在图像中清晰识别的目标点。确保目标点能够在不同帧的图像中清晰可见,并且不影响目标物体的振动特性。2.拍摄连续图像:使用摄像设备对目标点进行连续拍摄,捕捉目标物体振动的过程。拍摄的帧率应足够高,以捕捉到振动的快速变化。3.图像处理:对连续的图像序列进行处理,通过图像处理技术检测和跟踪目标点在不同帧中的位置。可以利用计算机视觉中的目标追踪算法,例如光流法(opticalflow)或特征点匹配等方法,来追踪目标点的运动轨迹。4.位移计算:根据目...
- 成都图像位移计供应厂家 2025-11-25
- 多点式位移计精度 2025-11-25
- 高精度位移计速度 2025-11-25
- 阵列式位移计供应 2025-11-25
- 四川隧道巡检机器人供应厂家 2025-11-25
- 工程试验位移计推荐品牌 2025-11-24
- 四川图像位移测试系统采购 2025-11-24
- 成都机器视觉测量仪生产 2025-11-24
- 视频位移计批发商 2025-11-24
- 国产位移计安装 2025-11-24



- 高精度位移计批发价 2025-11-23
- 非接触位移计算法 2025-11-23
- 成都阵列式位移计生产厂家 2025-11-23
- 高精度位移计厂家供应 2025-11-22
- 四川阵列式位移计厂家有哪些 2025-11-22
- 四川工程试验位移计厂家现货 2025-11-22


- 多点式位移计精度 11-25
- 四川巡检机器人定制 11-25
- 高精度位移计速度 11-25
- 阵列式位移计供应 11-25
- 四川隧道巡检机器人供应厂家 11-25
- 巡检机器人定制 11-24
- 工程试验位移计推荐品牌 11-24
- 四川图像位移测试系统采购 11-24
- 成都机器视觉测量仪生产 11-24
- 成都巡检机器人研发 11-24