- 品牌
- 中科图测
- 型号
- ziki-M
- 类型
- 图像/视频位移计
- 测量精度
- ±0.02mm(距离1m);±0.1mm(距离10m);±0
- 工作温度
- -30℃至+60℃;
- 用途
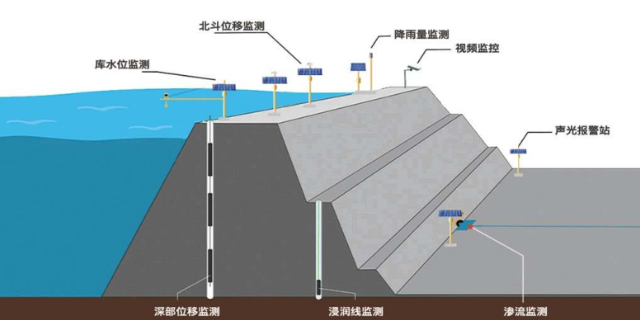
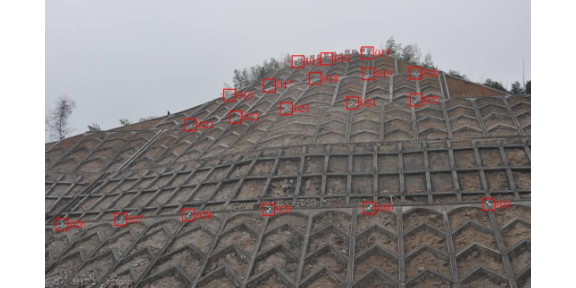
- 桥梁、隧道、大坝、护坡、山体以及建筑物等结构位移的长期监测
- 规格
- ziki-M
- 外形尺寸
- 220*120*90
- 重量
- 1
- 厂家
- 中科图测
- 产地
- 成都
- 监测距离
- 2m-500m
- 同时监测点数
- 100
- 相机分辨率
- 30万-200万
- 采集频率
- 1-800Hz
- 供电方式
- 市电交流220V /太阳能
- 靶标类型
- 有源靶标/无源靶标
- 主机功耗
- 15W
- 防护等级
- IP65
- 传输方式
- 支持有线传输、4G/5G传输
相机位移计是一种用于测量相机在空间中的位移和姿态变化的设备。它通常由多个传感器和计算单元组成,能够实时地监测相机的位置和方向,并将这些数据用于各种应用,如虚拟现实、增强现实、机器人导航等。相机位移计的工作原理通常基于传感器技术,包括惯性测量单元(IMU)、全局定位系统(GPS)、视觉传感器等。这些传感器能够感知相机的加速度、角速度、方向等信息,并将其转化为数字信号,供计算单元进行处理。在相机位移计中,IMU是蕞常用的传感器之一。它由加速度计和陀螺仪组成,能够测量相机的线性加速度和角速度。通过积分这些测量值,可以得到相机的速度和位移。然而,由于积分的误差会随着时间的推移而累积,所以IMU通常需要与其他传感器结合使用,以提高测量的准确性和稳定性。位移计可以用于监测建筑物的变形和结构的位移。国产位移计安装

相机位移计是一种用于测量相机在空间中的位移和姿态变化的设备。它通常由多个传感器和算法组成,可以精确地测量相机的位置和方向,从而实现图像稳定、导航和姿态控制等应用。相机位移计的工作原理可以分为两个主要步骤:传感器测量和姿态估计。传感器测量:相机位移计通常使用多种传感器来测量相机的位移和姿态变化。常见的传感器包括加速度计、陀螺仪、磁力计和视觉传感器等。加速度计:加速度计可以测量相机在三个轴向上的加速度。通过积分加速度信号,可以得到相机的速度和位移信息。陀螺仪:陀螺仪可以测量相机绕三个轴向的角速度。通过积分角速度信号,可以得到相机的姿态信息。磁力计:磁力计可以测量地球磁场的方向,从而提供相机的方向信息。视觉传感器:视觉传感器可以通过分析相机拍摄的图像来估计相机的位移和姿态变化。这种方法通常称为视觉里程计或视觉惯性导航。这些传感器通常以高频率采样数据,并通过滤波和校准等技术进行数据处理,以提高测量的准确性和稳定性。宽度测量位移计位移计可以用于测量物体的线性位移,也可以用于测量物体的角位移。
相机位移计是一种用于测量物体的位移的设备,它通过记录相机在空间中的位置变化来计算物体的位移。与其他测量设备相比,相机位移计具有以下几个不同之处:非接触式测量:相机位移计是一种非接触式测量设备,它不需要与被测物体直接接触。相机通过拍摄物体的图像,并通过图像处理算法来计算物体的位移。这种非接触式测量方法可以避免对被测物体造成损伤,并且适用于各种形状和材料的物体。高精度测量:相机位移计具有较高的测量精度。通过使用高分辨率的相机和精确的图像处理算法,相机位移计可以实现亚像素级别的位移测量精度。这使得相机位移计在需要高精度位移测量的应用中具有优势,例如机械工程、材料研究等领域。
位移计在工程和科学研究中起着非常重要的作用。它是一种测量物体的位置变化的仪器,可以用来测量物体的位移、变形和振动等。下面是位移计在工程和科学研究中的几个主要应用领域:结构工程:位移计被广泛应用于结构工程中,用于监测建筑物、桥梁、隧道等结构物的变形和位移。通过实时监测结构物的位移,可以及时发现结构的变形和位移情况,预测结构的安全性,并采取相应的维修和加固措施。地震工程:位移计在地震工程中起着重要的作用。地震时,地震波会引起地表的位移和变形,位移计可以用来测量地震波对地表的影响,从而评估地震对建筑物和结构物的破坏程度,为地震安全设计提供依据。位移计可以用于测量建筑物的沉降和变形。

位移计的价格范围是根据不同型号、品牌和功能而有所差异。以下是一些常见的位移计价格范围供参考:便携式位移计:通常价格在100美元到500美元之间。这些位移计适合简单的测量任务,如建筑、机械和土木工程中的位移测量。桌面式位移计:价格范围从500美元到2000美元不等。这些位移计通常具有更高的精度和更多的功能选项,适用于实验室和工业环境中的位移测量。高精度位移计:价格通常在2000美元以上。这些位移计具有非常高的精度和稳定性,适用于精密测量和科学研究领域。需要注意的是,以上价格供参考,实际价格可能会因市场供需、地区差异和特殊要求而有所变化。建议您在购买前与供应商或经销商联系,以获取准确的报价和详细信息。成都中科图测的位移计可用于桥梁和隧道的结构监测。四川视觉位移计厂家现货
宽度测量位移计的精度通常在微米级别,可以满足高精度测量的要求。国产位移计安装
相机位移计是一种用于测量相机在空间中的位移和姿态变化的设备。它可以通过测量相机的位置和方向的变化来提供准确的位移和姿态信息。相机位移计在许多应用领域中都有广泛的应用,下面是一些常见的应用领域:机器人导航和定位:相机位移计可以用于机器人导航和定位系统中,帮助机器人准确地感知和理解周围环境的变化。它可以提供机器人的位置和方向信息,使机器人能够在复杂的环境中进行准确的导航和定位。虚拟现实和增强现实:相机位移计可以用于虚拟现实和增强现实应用中,帮助跟踪用户的头部和眼睛的运动,从而实现更加沉浸式和交互式的虚拟现实和增强现实体验。国产位移计安装

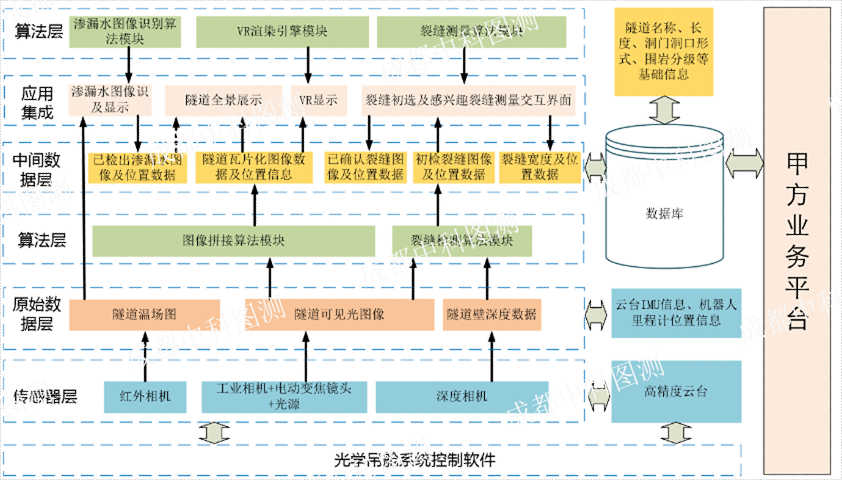
利用图像位移计测量振动加速度需通过目标点在连续图像中的位移变化来实现。以下是一种可能的操作流程:1.安装目标点:在振动目标物体表面上安装一个反光点或者其他能够在图像中清晰识别的目标点。确保目标点能够在不同帧的图像中清晰可见,并且不影响目标物体的振动特性。2.拍摄连续图像:使用摄像设备对目标点进行连续拍摄,捕捉目标物体振动的过程。拍摄的帧率应足够高,以捕捉到振动的快速变化。3.图像处理:对连续的图像序列进行处理,通过图像处理技术检测和跟踪目标点在不同帧中的位置。可以利用计算机视觉中的目标追踪算法,例如光流法(opticalflow)或特征点匹配等方法,来追踪目标点的运动轨迹。4.位移计算:根据目...
- 成都图像位移计供应厂家 2025-11-25
- 多点式位移计精度 2025-11-25
- 高精度位移计速度 2025-11-25
- 阵列式位移计供应 2025-11-25
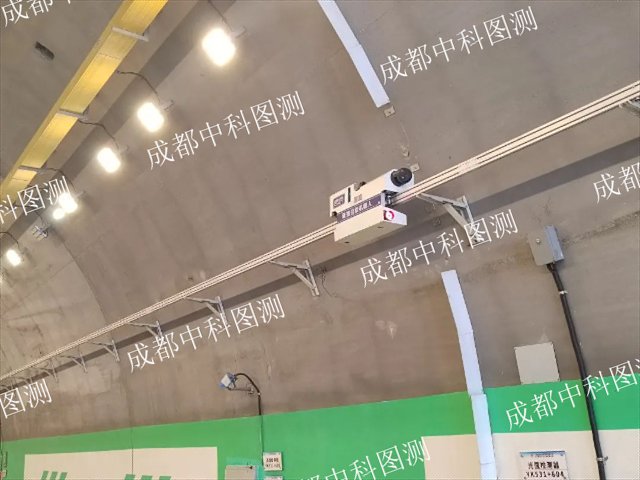
- 四川隧道巡检机器人供应厂家 2025-11-25
- 工程试验位移计推荐品牌 2025-11-24
- 四川图像位移测试系统采购 2025-11-24
- 成都机器视觉测量仪生产 2025-11-24
- 视频位移计批发商 2025-11-24
- 国产位移计安装 2025-11-24



- 高精度位移计批发价 2025-11-23
- 非接触位移计算法 2025-11-23
- 成都阵列式位移计生产厂家 2025-11-23
- 高精度位移计厂家供应 2025-11-22
- 四川阵列式位移计厂家有哪些 2025-11-22
- 四川工程试验位移计厂家现货 2025-11-22


- 多点式位移计精度 11-25
- 四川巡检机器人定制 11-25
- 高精度位移计速度 11-25
- 阵列式位移计供应 11-25
- 四川隧道巡检机器人供应厂家 11-25
- 巡检机器人定制 11-24
- 工程试验位移计推荐品牌 11-24
- 四川图像位移测试系统采购 11-24
- 成都机器视觉测量仪生产 11-24
- 成都巡检机器人研发 11-24