- 品牌
- 中科图测
- 型号
- ziki-M
- 类型
- 图像/视频位移计
- 测量精度
- ±0.02mm(距离1m);±0.1mm(距离10m);±0
- 工作温度
- -30℃至+60℃;
- 用途
- 桥梁、隧道、大坝、护坡、山体以及建筑物等结构位移的长期监测
- 规格
- ziki-M
- 外形尺寸
- 220*120*90
- 重量
- 1
- 厂家
- 中科图测
- 产地
- 成都
- 监测距离
- 2m-500m
- 同时监测点数
- 100
- 相机分辨率
- 30万-200万
- 采集频率
- 1-800Hz
- 供电方式
- 市电交流220V /太阳能
- 靶标类型
- 有源靶标/无源靶标
- 主机功耗
- 15W
- 防护等级
- IP65
- 传输方式
- 支持有线传输、4G/5G传输
位移计的测量原理有多种,下面介绍几种常见的位移计测量原理:光学位移计:光学位移计利用光学原理来测量位移。它通常由一个光源、一个光学传感器和一个测量物体组成。光源发出光线,经过物体反射后被光学传感器接收。通过测量光线的强度、相位或干涉等参数的变化,可以确定物体的位移量。电阻式位移计:电阻式位移计利用电阻的变化来测量位移。它通常由一个电阻元件和一个测量电路组成。当物体发生位移时,电阻元件的长度或截面积会发生变化,从而导致电阻值的变化。测量电路可以通过测量电阻值的变化来确定物体的位移量。压电位移计:压电位移计利用压电效应来测量位移。压电材料具有特殊的电荷分布结构,当施加力或压力时,会产生电荷的不均匀分布,从而产生电势差。通过测量电势差的变化,可以确定物体的位移量。拉线位移计:拉线位移计利用拉线的伸缩来测量位移。它通常由一个固定的参考点、一个可移动的测量点和一根连接两者的拉线组成。当物体发生位移时,拉线会伸缩,从而导致测量点相对于参考点的位置变化。通过测量拉线的伸缩量,可以确定物体的位移量。成都中科图测的位移计可用于土木工程和建筑工程的监测。成都高精度位移计厂家供应

图像位移计在工程试验中有广泛的应用。首先,图像位移计可用于结构负载试验,在试验过程中实时监测结构的位移和变形情况,提供准确的结构响应数据。其非接触式测量方式保证了试验过程的安全和完整性。其次,图像位移计可用于材料力学试验,通过监测试样表面的位移和畸变,评估材料的力学性能和变形行为。此外,图像位移计还可用于地基和土力试验,监测土体的变形和沉降情况,分析土壤的承载能力和稳定性。另外,图像位移计还可用于振动试验和风洞试验,通过监测振动或风力加载下结构的位移响应,评估结构的动态性能和安全性。总之,图像位移计在工程试验中具有广泛的应用领域,能够提供准确可靠的位移和变形监测数据,为工程设计和结构优化提供有力支持。成都电阻式位移计厂家现货成都中科图测的位移计广泛应用于工程测量领域。

仪器安装位置的选择对于测量结果具有重要影响。若选择不当,可能会导致测量误差的增加。为解决此问题,应根据具体的测量需求选择合适的安装位置,并遵循仪器说明书中的建议。仪器与被测对象之间的连接也是需要注意的问题。位移计需要与被测对象进行连接,以实现位移的测量。若连接方式不正确或连接不牢固,可能会导致测量误差的产生。为解决此问题,应确保连接方式正确,并使用适当的连接件进行连接。此外,仪器的读数可能存在一定的误差,需要进行误差校正。为解决此问题,可根据仪器说明书中的校正方法进行校正,或使用校准设备进行校正。
检测材料的弹性和塑性行为:位移计可以测量材料在受力过程中的位移变化,从而帮助研究材料的弹性和塑性行为。通过测量材料的位移变化,可以确定材料的弹性模量和塑性变形程度。这对于研究材料的力学性能和变形行为非常重要。监测材料的破坏行为:位移计可以监测材料在受力过程中的位移变化,从而帮助研究材料的破坏行为。通过测量材料的位移变化,可以确定材料的破坏模式和破坏强度。这对于研究材料的力学性能和破坏行为非常重要。成都中科图测的位移计在行业内享有良好的声誉和口碑。

相机位移计是一种设备,用于测量相机在空间中的位移和姿态变化。它由多个传感器和计算单元组成,能够实时监测相机的位置和方向,并将这些数据应用于虚拟现实、增强现实、机器人导航等领域。相机位移计的工作原理基于传感器技术,包括惯性测量单元(IMU)、全局定位系统(GPS)、视觉传感器等。这些传感器能够感知相机的加速度、角速度、方向等信息,并将其转化为数字信号供计算单元处理。在相机位移计中,IMU是常用的传感器之一,由加速度计和陀螺仪组成,用于测量相机的线性加速度和角速度。通过对这些测量值进行积分,可以得到相机的速度和位移。然而,由于积分误差会随着时间累积,因此IMU通常需要与其他传感器结合使用,以提高测量的准确性和稳定性。成都中科图测的位移计可用于科研和实验室应用。机器视觉测量仪模型
位移计可以用于测量海洋和湖泊的水位变化。成都高精度位移计厂家供应
除了线性应变和剪切应变,还有一些其他类型的应变,如体积应变、热应变和电应变等。体积应变是指物体在受到体积变化力作用下发生的形变,可以通过测量物体的体积变化来计算。热应变是指物体在温度变化下发生的形变,可以通过测量物体的长度或体积变化来计算。电应变是指物体在电场作用下发生的形变,可以通过测量物体的电阻、电容或电感值的变化来计算。位移计测量应变是一种常用的测量方法,它可以通过测量物体的形变或变形程度来计算物体的位移。应变计和光栅测量是常用的位移计测量设备,它们具有高精度、非接触和无损等优点,在工程、科学研究和制造业等领域有着广泛的应用。成都高精度位移计厂家供应

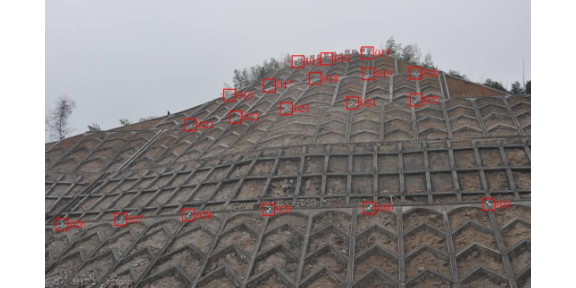
利用图像位移计测量振动加速度需通过目标点在连续图像中的位移变化来实现。以下是一种可能的操作流程:1.安装目标点:在振动目标物体表面上安装一个反光点或者其他能够在图像中清晰识别的目标点。确保目标点能够在不同帧的图像中清晰可见,并且不影响目标物体的振动特性。2.拍摄连续图像:使用摄像设备对目标点进行连续拍摄,捕捉目标物体振动的过程。拍摄的帧率应足够高,以捕捉到振动的快速变化。3.图像处理:对连续的图像序列进行处理,通过图像处理技术检测和跟踪目标点在不同帧中的位置。可以利用计算机视觉中的目标追踪算法,例如光流法(opticalflow)或特征点匹配等方法,来追踪目标点的运动轨迹。4.位移计算:根据目...
- 成都图像位移计供应厂家 2025-11-25
- 多点式位移计精度 2025-11-25
- 高精度位移计速度 2025-11-25
- 阵列式位移计供应 2025-11-25
- 四川隧道巡检机器人供应厂家 2025-11-25
- 工程试验位移计推荐品牌 2025-11-24
- 四川图像位移测试系统采购 2025-11-24
- 成都机器视觉测量仪生产 2025-11-24
- 视频位移计批发商 2025-11-24
- 国产位移计安装 2025-11-24



- 高精度位移计批发价 2025-11-23
- 非接触位移计算法 2025-11-23
- 成都阵列式位移计生产厂家 2025-11-23
- 高精度位移计厂家供应 2025-11-22
- 四川阵列式位移计厂家有哪些 2025-11-22
- 四川工程试验位移计厂家现货 2025-11-22


- 多点式位移计精度 11-25
- 四川巡检机器人定制 11-25
- 高精度位移计速度 11-25
- 阵列式位移计供应 11-25
- 四川隧道巡检机器人供应厂家 11-25
- 巡检机器人定制 11-24
- 工程试验位移计推荐品牌 11-24
- 四川图像位移测试系统采购 11-24
- 成都机器视觉测量仪生产 11-24
- 成都巡检机器人研发 11-24