点位操控(PTP)是一种只关注打磨机器人末端执行器在作业空间中特定离散点位置和姿态的操控方式。在操作过程中,只要求打磨机器人能迅速、准确地在相邻各点之间移动,而对达到目标点的移动路径并无特定要求。这种操控方式的两个主要技术指标是定位精度和运动时间。由于其实现相对简单,且对定位精度的要求相对较低,因此,点位操控常常被用于如上下料、转移、点焊以及在电路板上安装元件等只需要在目标点保持末端执行器精确位置和姿态的任务中。尽管这种操控方式相对简单,但要实现2~3um的高定位精度却是一项极具挑战性的任务。机器操作简单,节省人力资源,降低生产成本。杭州打磨机报价
力(力矩)操控方法在打磨机器人的应用中起着至关重要的作用。当机器人执行如安装、抓放物体等任务时,除了需要精确的定位,还要求所施加的力或力矩必须适中。为了实现这一目标,就需要使用到(力矩)伺服方法。这种操控方法的原理与位置伺服操控原理基本相似,但其输入量和反馈量不是位置信号,而是力(力矩)信号。因此,这种控制体系中必须有相应的力(力矩)传感器。在某些情况下,还会使用到接近、滑动等传感功能,以实现自适应式操控。河南机器人打磨抛光机机器人打磨技术可以根据产品的形状和曲面,自动调整打磨路径和力度,提高打磨效果,并减少人工成本。

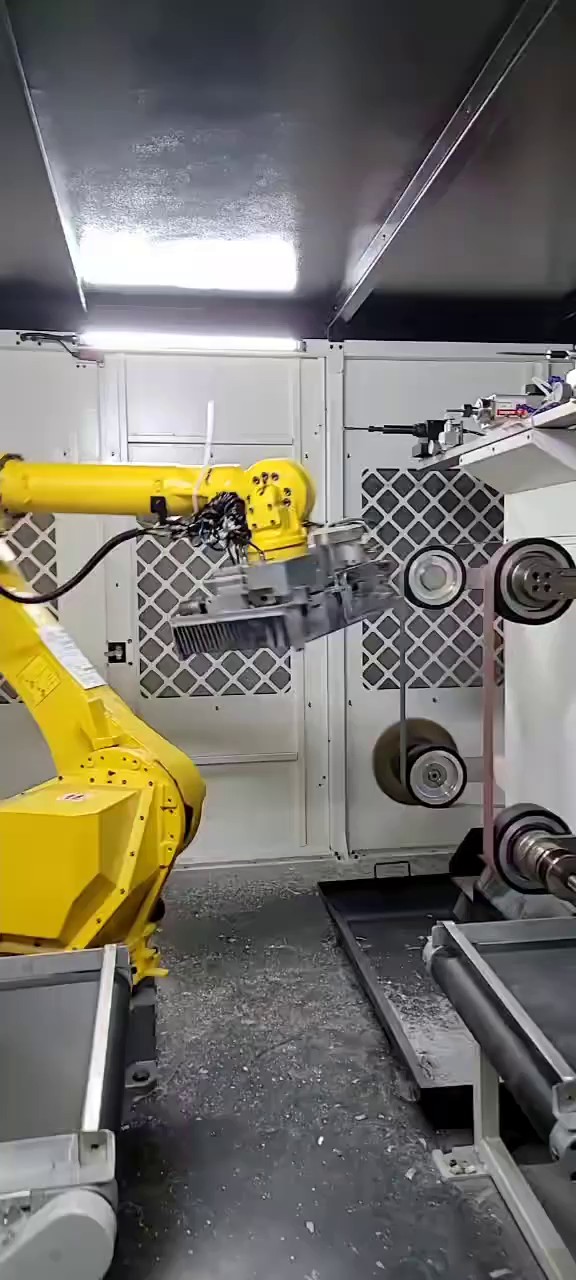
在实际的生产过程中,由于工件材质的多样性和复杂性,工件成型所涉及的工艺也各不相同,包括钣金、冲压、铸造、注塑、CNC等多种方式。这些不同的材质和成型方式会导致工件在尺寸上存在一定的公差,尽管这些公差可能只是数据大小上的差异。然而,正是这些微小的差异,使得机器人打磨技术的应用变得尤为重要。通过精确的编程和高度灵活的机械臂,机器人能够精确地识别和处理这些微小的尺寸差异,确保每一件产品都能达到预期的打磨效果。在当今市场中,打磨机器人已成为应用普遍且技术较为成熟的机器人之一。其之所以能得到如此普遍的应用,主要归功于其多样化的操控方式。根据作业任务的不同,打磨机器人主要可以分为四种操控方法:点位操控、接连轨道操控、力(力矩)操控和智能操控。接下来,我们将详细解析这些操控方法的功能要点。
压铸成型的工件外尺寸往往存在误差。当使用固定的切削路径进行加工时,这些尺寸误差同样会导致切削效果的不均匀。过切或切削不足的情况在这种背景下是无法完全避免的,这也是当前许多机器人去毛刺设备在实际应用中效果不佳或失败的主要原因。因此,要优化和提升机器人去毛刺的加工效果,不仅需要关注硬件方面的因素,如刀具、主轴转速和切屑速度等,还需在机器人的编程和示教过程中,尽量减少人为误差,提高点位的精确性。针对压铸件尺寸误差的问题,也需通过更加智能和灵活的切削路径规划来加以解决。这些措施的综合应用,将有助于明显提升机器人去毛刺的加工效果,从而满足更高标准的生产要求。打磨机器人可以通过精确的程序控制完成复杂的打磨任务,进一步提高工作效率。

打磨机械手通过其精确的力控制和适应性强的特点,成功解决了传统打磨过程中存在的问题,为制造行业带来了更高的生产效率、更好的产品和更低的成本。在未来,随着技术的不断进步,打磨机械手有望在更多领域发挥更大的作用。在去除毛刺的打磨加工过程中,影响毛刺打磨效果的因素繁多且关键。这其中,刀具、主轴转速、切屑速度以及机器人的运动轨迹都是不可忽视的要素。尤其是机器人的运动轨迹,它直接决定了加工过程中的运动路径。尽管我们深知机器人在重复定位方面的精度极高,但在编程阶段,机器人的点位通常依赖于示教过程。示教过程需要人工进行位置确认,这就不可避免地引入了人为误差,使得点位存在偏差。这种偏差会直接影响到切屑效果,造成加工后的表面质量不均匀。打磨机器人具有长时间连续工作能力和低运营成本。广西大型铸件打磨机器人
抛光机打磨机可根据产品要求,选择合适的抛光工艺。杭州打磨机报价
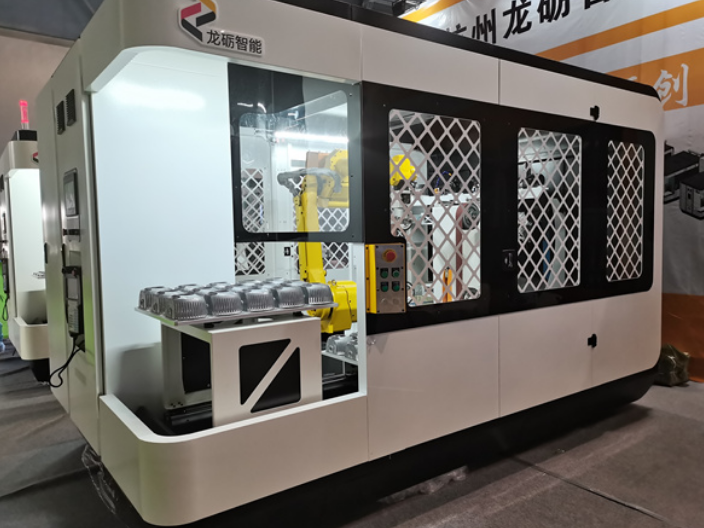
机器换人技术的应用不仅提高了生产效率,更重要的是,它为企业带来了全方面的安全保障。从改善工人的工作环境,到提升生产现场的整体安全水平,自动化生产线的引入都是一次积极的变革。随着技术的不断进步,我们有理由相信,未来的工业生产将更加安全、高效、环保。相较于传统的抛光打磨专机,机器人抛光打磨的应用展现出了更高的灵活性。对于广大的中小型制造业企业来说,市场的外部环境要求他们遵循订单批次的生产模式。这意味着生产线必须根据每个订单批次的需求进行相应的调整。在这方面,专机往往需要进行大规模的改动,这既费时又费力。杭州打磨机报价