
智能采摘机器人的市场发展正处于从技术验证阶段向规模化商业应用转型的关键时期,全球市场呈现出鲜明的地域与作物分化特征,同时也面临着诸多机遇与挑战。从市场规模来看,截至2025年底,全球智能采摘机器人行业市场规模已突破8.5亿美元,预计到2030年,复合年增长率将维持在28%以上的高位,其中亚太市场增长...
智能采摘机器人基本参数
- 品牌
- 熙岳智能
- 型号
- 智能采摘机器人
- 加工定制
- 是
智能采摘机器人企业商机
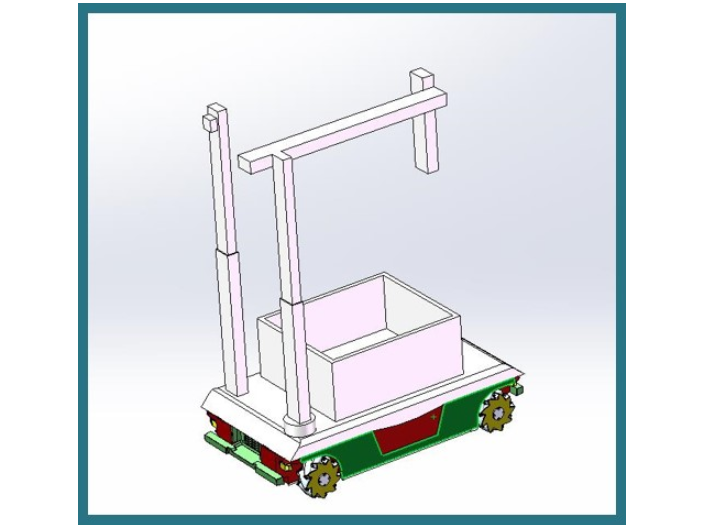
目前,国内番茄采摘作业基本上依靠手工完成,增加了工人的体力消耗,影响工作效率,且工人休息时得不到很好的休息条件,特别是在天气炎热时,不能充分放松,影响后续的工作。因此,研发自动化的采摘机器人非常有必要。技术实现要素:本实用新型所要解决的技术问题是:提供一种番茄采摘机器人,替代人工操作,完成番茄的智能采摘动作,自动化程度高,省时省力,节省人力成本。为解决上述技术问题,熙岳目前采用的一个技术方案是:提供一种番茄采摘机器人,包括底盘,所述底盘的上端且前方设有雷达扫描装置,所述雷达扫描装置的上方设有显示装置。果蔬采摘机器人(智能采摘机器人)研究始于20世纪60年代的美国,采用的收获方式主要有机械震摇式和气动震摇式,其缺点是果实易损,效率不高。此后,随着电子技术和科学技术的发展,特别是工业机器人技术、计算机图像处理技术和人工智能技术的成熟,采摘机器人的研究和开发技术得到了快速发展。国内对采摘机器人的研究有一定的成果,但大多还停留在研究阶段,而这些采摘机器人体积比较大,制作成本比较高,智能化程度不是很高,距离完全应用在实际农业中还有一定的差距。 简化操作能让农林业采收机器人能够更快地在农林业生产中得到普及。江西草莓智能采摘机器人处理方法
智能采摘机器人
试验表明末端执行器的采摘成功率约为50%,原因是末端执行器难以稳定进入枝叶间夹住主穗轴、气压不足以产生足够夹持力和果实掉落。成穗采摘方式无法适应同一果穗上番茄成熟期的差异,其适用性依赖于番茄新品种和新栽培技术的进展以及特定的市场需求。智能采摘机器人作业时,上下两指同时合拢,当两指接触到番茄穗所在主枝干后,限位开关发出信号,气缸驱动的上下两指并拢夹住并切断果穗,而后推板接触果穗,以防止果穗在运输过程中的抖动。福建制造智能采摘机器人智能采摘机器人可通过语音控制开始或者结束采摘工作,并可实现简单的互动递送果实功能。

当智能采摘机器人巡检时检测到有病虫害时,通过病虫害种类和病虫害的位置调度喷药机器人完成喷雾作业;当巡检机器人检测到花朵开放,根据花朵位置调度授粉机器人进行授粉;当巡检机器人检测到果实成熟期时,根据成熟度信息和位置调度采摘机器人完成采摘作业;采摘机器人采摘满筐之后,自动呼叫运输机器人对接果实筐,将果实运输到分拣包装区;多种机器人系统可在云端调度系统的调度下自动分配任务,根据任务优先级进行交通管制。系统中所有机器人均采用精度较高的激光传感器对环境进行识别,配合部分机器人的视觉系统,能够有效辨别静态和动态的障碍物,进行避障处理,保证系统中各个单位能够不矛盾、协调配合。
从运输、喷药、授粉、巡检、采摘,几乎每个流程都实现了少人化作业,据林森介绍,这个项目已经在山东寿光智慧农业科技园进行了广泛应用。尽管现场的机器人看上去行动比较缓慢,有一点笨笨的,但其实这只是为了现场的安全而特意减慢了速度。实际上,在无人环境中应用的机器人采摘速度会更快,基本能达到2—3秒左右一次,同时也能实现多机器人的协作作业。智能采摘机器人的技术创新,要说机器人,可以说是男人比较大的浪漫。动漫里的自动化机器人总是让人心驰神往。但在农业的现实生活中,目前大面积商业化的智慧农业产品只有两个:一是无人机,二是自动驾驶拖拉机。这两样东西听上去蛮厉害的,但似乎和机器人相比,还是少了点什么。如果农业机器人能够大范围的进行使用的话,就能解决很大一部分劳动力紧张和人工成本高昂的问题。设施园艺机器人主要运用于番茄种植,这个系统几乎覆盖了番茄种植过程中的所有生产流程。 智能采摘机器人数据可以让机器确定比较好路线,绕过藤蔓、叶子以及其他未成熟的作物,去采摘它的目标。

劳动力短缺:在一年一次的丰收中,农民可能会遇到如下问题:人手不足;天气极端;利润微薄;繁琐的重复劳动。若能使用机器人对成熟的果实进行采摘和分拣,农民便可以专注于更具价值的事情。这样的想法不算新鲜,但实践起来却十分困难。首先,要做到识别:果实与其他物体有分别,果实本身大小、形状、颜色、成熟程度也不一,机器人要识别出成熟的果实,而非收集边上的叶片。其次,要做到精细:高额作物要求机器人“小心翼翼”地操作,这涉及到更加精细的技术知识。智能采摘机器人控制机器人的电机转动,带动夹爪到小番茄的位置,摘取小番茄,然后放入采摘篮里。吉林自动智能采摘机器人优势
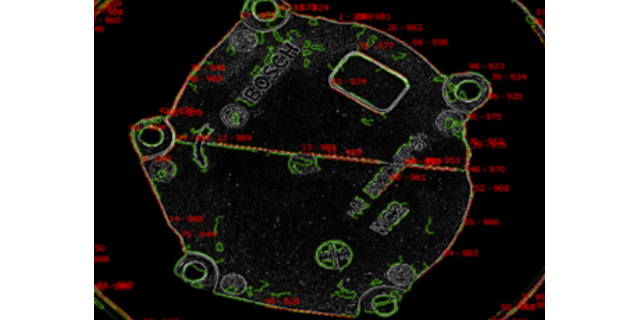
智能采摘机器人小车配置视觉识别功能,对小车前进指引方向并定位。江西草莓智能采摘机器人处理方法
番茄成穗生长,相互触碰,造成智能采摘机器人对目标果实的夹持空间受限,夹持动作失败或把相邻果实碰伤;番茄果实的生长方位差异极大,每次采摘的姿态和作用力关系都有所变化;果梗较短且梗长不一,造成机械式刀头难以顺利实施果梗的切割,而扭断、折断果梗的力学作用规律变化很大,成功率受限,进一步加大采摘的难度。因此末端执行器成为番茄机器人收获的研究关注点,其形式各异、功能相差极大。功能单一的剪断式末端执行器无法满足机器人采摘作业的要求,因而相继衍生出夹剪一体式和夹果断梗式两大类末端执行器。江西草莓智能采摘机器人处理方法
南京熙岳智能科技有限公司位于嘉陵江东街18号加速器1栋19层,是一家专业的智能技术研发;自动化设备、传感器的研发、制造、销售;通讯设备、机电设备、仪器仪表、工业自动控制系统装置的设计、制造、销售、安装、技术服务;信息系统集成服务;软件销售、技术开发、技术转让、技术咨询、技术服务。公司。专业的团队大多数员工都有多年工作经验,熟悉行业专业知识技能,致力于发展熙岳智能的品牌。我公司拥有强大的技术实力,多年来一直专注于智能技术研发;自动化设备、传感器的研发、制造、销售;通讯设备、机电设备、仪器仪表、工业自动控制系统装置的设计、制造、销售、安装、技术服务;信息系统集成服务;软件销售、技术开发、技术转让、技术咨询、技术服务。的发展和创新,打造高指标产品和服务。诚实、守信是对企业的经营要求,也是我们做人的基本准则。公司致力于打造***的采摘机器人,智能草坪养护机器人,非标设备定制,软件开发系统。
与智能采摘机器人相关的文章

福建品质智能采摘机器人按需定制
- 天津自动化智能采摘机器人技术参数 2026-03-10
- 浙江智能智能采摘机器人 2026-03-10
- 上海番茄智能采摘机器人案例 2026-03-10
- 江苏智能智能采摘机器人品牌 2026-03-10
- 江西自制智能采摘机器人公司 2026-03-10
- 天津节能智能采摘机器人制造价格 2026-03-09
- 安徽猕猴挑智能采摘机器人 2026-03-09
- 江苏智能智能采摘机器人公司 2026-03-09
- 小番茄智能采摘机器人定制 2026-03-09
- 上海番茄智能采摘机器人私人定做 2026-03-09
- 北京自动智能采摘机器人定制 2026-03-09
- 浙江制造智能采摘机器人定制 2026-03-09
与智能采摘机器人相关的产品

与智能采摘机器人相关的新闻
-
江西荔枝智能采摘机器人公司 2026-03-06 06:01:40采摘机器人的涟漪效应正沿着产业链扩散。上游催生新的零部件产业:德国某小镇专门生产机器人的抗露水镜头涂层,成为隐形企业。采收时间精细控制使冷链物流效率提升:机器人预约卡车在采摘完成30分钟到场,农产品从离开植株到进入预冷车间不超过45分钟。消费端也因此受益:超市可获得每颗苹果的采收时间、糖度曲线甚至日...
-
浙江AI智能采摘机器人价格 2026-03-04 04:01:33随着具身智能与农业元宇宙技术的发展,苹果采摘机器人正走向全新阶段。下一代原型机已尝试配备触觉传感器阵列,能感知果实成熟度的细微差异;数字孪生系统在虚拟果园中预演百万次采摘,优化现实世界的动作路径。更深远的影响在于推动“无人化果园”生态的形成:机器人将与自主施肥无人机、地面监控机器狗、自动驾驶运输车组...
-
安徽草莓智能采摘机器人定制价格 2026-03-02 02:01:36识别之后,采摘本身是一项对精细度要求极高的机械艺术。机器人的“手”——末端执行器,其设计直接关系到采摘的成功率与果实的商品价值。针对番茄这种皮薄多汁的浆果,执行器必须兼具力度精细与动作柔和。常见的设计包括带有柔软衬垫的仿生夹爪,能自适应包裹果实形状,通过传感器反馈实现毫牛顿级的力度控制,在紧握与损伤...
-
江苏苹果智能采摘机器人性能 2026-02-10 01:01:06对于藏红花、花卉等极高价值作物,采摘机器人展现了无可替代的精细性。以藏红花为例,其有效部位只是花朵中的三根红色柱头,必须在清晨特定时段手工摘取。机器人配备显微视觉系统,能精细定位柱头,用微型钳子以0.1毫米精度进行分离。在荷兰花卉拍卖市场,玫瑰、百合采摘机器人能根据花苞开放度、茎秆长度和健康状况进行...
与智能采摘机器人相关的问题
新闻资讯
产品推荐
-

上海番茄智能采摘机器人私人定做
2026-03-09 -

北京自动智能采摘机器人定制
2026-03-09 -
浙江制造智能采摘机器人定制
2026-03-09 -
上海压装机定制机器视觉检测服务价格低
2026-03-08 -
天津榨菜包定制机器视觉检测服务趋势
2026-03-08 -
福建什么是智能采摘机器人公司
2026-03-08 -
江苏自制智能采摘机器人技术参数
2026-03-08 -
浙江aoi视觉检测设备
2026-03-08 -

北京多功能智能采摘机器人用途
2026-03-08