数据传输与通信模块承担着弧焊机器人内部及与外部设备的信息交互任务,确保系统各环节协同工作。内部通信通过工业总线实现,将控制系统的指令、传感器的感知数据、执行机构的状态信息实时传递,传输速率可达每秒数千条数据,保证响应的及时性。外部通信则支持以太网、无线局域网等多种方式,可与车间管理系统、其他自动化设备进行数据共享,例如接收生产计划、上传焊接进度和质量数据。模块采用抗干扰设计,能在焊接车间的电磁环境中保持稳定通信,避免数据丢失或误传,为智能化生产调度提供可靠的数据支撑。移动式焊接工作站较明显的特点之一便是其高度的灵活性。钣金焊接工作站生产
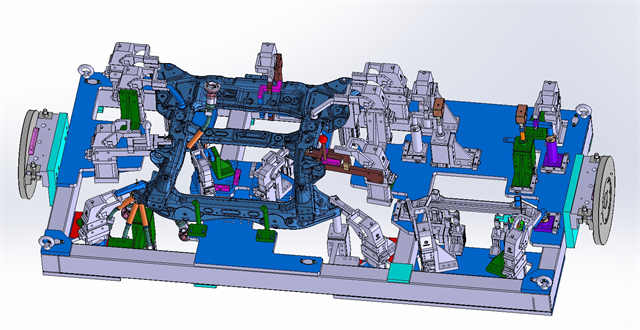
运动路径规划与优化系统负责为弧焊机器人规划高效、平稳的运动轨迹,减少无效动作并提升焊接效率。系统基于工件三维模型与焊缝位置信息,运用算法自动生成初始路径,再通过平滑处理消除轨迹中的急停、急转现象,使机械臂运动更连贯,降低对设备的磨损。对于多焊缝工件,系统能按照比较好顺序排列焊接路径,缩短空行程时间,提高单位时间内的焊接完成量。此外,还可根据工件变形情况进行动态路径调整,保证焊枪始终沿焊缝中心运动,避免因路径偏差影响焊接质量。激光切割工作站咨询在生产流程控制方面,后副车架焊接生产线采用了先进的生产管理系统和智能控制技术。
在生产效率提升方面,工业机器人弧焊工作站展现出显赫优势。传统人工焊接受限于操作强度与技能差异,单班产量往往难以稳定维持,而机器人工作站可实现 24 小时连续作业,只需定期进行耗材补给与设备检查,大幅延长有效生产时间。以中等复杂度的工件焊接为例,机器人单小时焊接效率可达人工的 1.5-2 倍,且随着工件批量增大,效率优势更为明显。此外,工作站集成的自动上下料装置与流水线对接功能,能实现从工件抓取、定位、焊接到成品移送的全流程自动化,减少工序间的等待时间,使生产节拍更加紧凑,助力企业实现产能的稳步提升。
焊缝跟踪感知设备是弧焊机器人实现准确焊接的关键,能实时识别焊缝位置并引导焊枪调整轨迹。常见的设备包括激光传感器和视觉识别系统:激光传感器通过发射激光束扫描工件表面,根据反射光的变化计算焊缝的三维坐标;视觉识别系统则利用高清摄像头拍摄焊缝图像,通过算法分析提取焊缝的形状和位置信息。这些感知数据会实时传输给控制系统,系统根据偏差自动调整机械臂的运动参数,确保焊枪始终对准焊缝中心。即使工件存在微小变形或装配误差,该设备也能及时补偿,提高焊接质量的一致性。弧焊工作站通过精密的控制系统,能够实现对这些参数的精确设定和实时调整。

在各行业的实际应用中,工业机器人弧焊工作站展现出强大的适应性与实用性。在汽车零部件生产领域,某企业引入工作站后,变速箱壳体的焊接合格率从原来的 92% 提升至 99.5%,每年减少废品损失数十万元。在钢结构制造行业,工作站成功解决了大型构件焊接变形难题,通过多机器人协同作业,实现了复杂焊缝的一次成型,生产周期缩短近三分之一。而在医疗器械生产中,其高精度焊接能力满足了产品对焊缝强度与密封性的严苛要求,助力企业通过行业认证,拓展市场空间。移动式焊接工作站采用精确的焊接机器人和先进的控制系统,能够实现对焊接过程的准确控制。移动式焊接工作站供应报价
弧焊工作站能灵活应对多种加工方式,如平焊、横焊、拼焊、立焊、纵缝焊、圆弧焊、相贯线焊、多曲面焊等。钣金焊接工作站生产
工业机器人弧焊工作站具备普遍的工艺兼容性,能够满足不同焊接场景的技术要求。针对薄板焊接,工作站可通过低飞溅焊接工艺,实现焊缝表面的光滑平整,减少后续打磨工序;对于中厚板焊接,则能切换至深熔焊模式,确保焊缝熔深达到工件厚度的 30% 以上,满足结构强度需求。此外,工作站还支持脉冲焊、短路过渡焊等多种焊接方式,可根据不同材质特性(如高碳钢的淬硬倾向、铝合金的氧化问题)自动调整工艺参数,实现稳定焊接。无论是复杂的空间曲线焊缝,还是规则的直线焊缝,都能保持一致的焊接质量。钣金焊接工作站生产