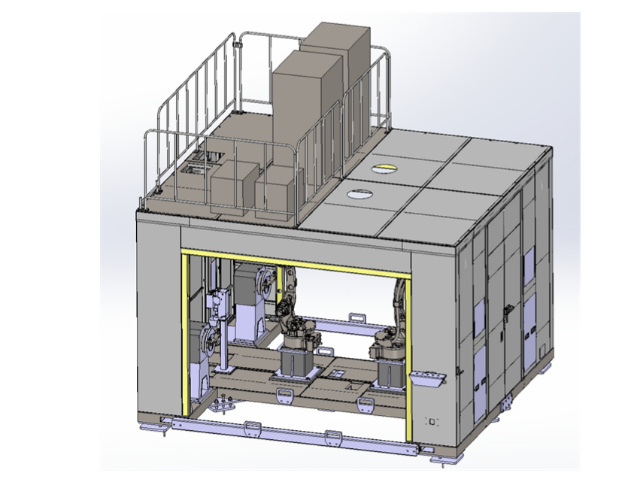
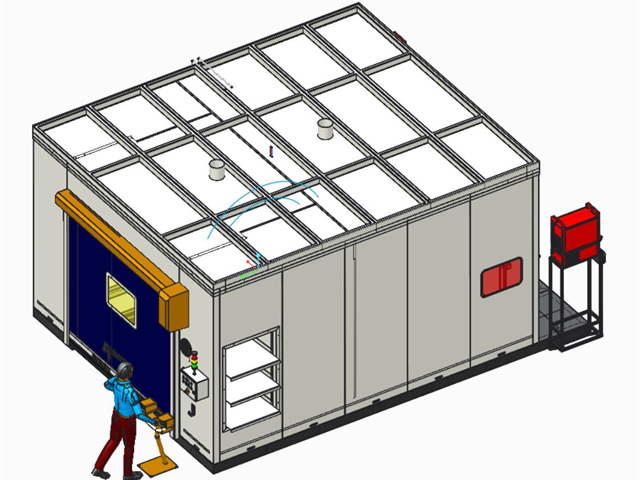
在人机协作方面,工业机器人弧焊工作站设置了多重安全保障与便捷交互方式。工作站配备红外感应装置,当人员进入危险区域时,机器人会自动降低运行速度或暂停作业,待人员离开后恢复正常运行。操作面板采用防水防尘设计,配备实体按键与触摸显示屏,支持中英文切换,操作人员可通过直观的图标引导完成参数设置。此外,还预留了外接手持操作器的接口,方便技术人员在设备调试或复杂工件焊接时进行灵活操控,提升作业的便利性。
工业机器人弧焊工作站在成本控制方面为企业提供了多重优势,助力实现投资回报的优化。设备的能耗成本较低,结合智能电力管理系统,每年可节省的电费相当于设备采购成本的 5%-8%。耗材方面,通过准确的送丝控制与电弧稳定技术,焊丝的利用率提升 10% 左右,减少了浪费。维护成本上,由于中心部件的高可靠性与模块化设计,年均维护费用只为传统设备的 60%。综合测算,多数企业在设备投入使用后的 2-3 年内即可收回初期投资,长期使用的经济性更为显赫。 手机弧焊工作站记录的数据支撑中框焊接质量追溯。武汉激光切割工作站

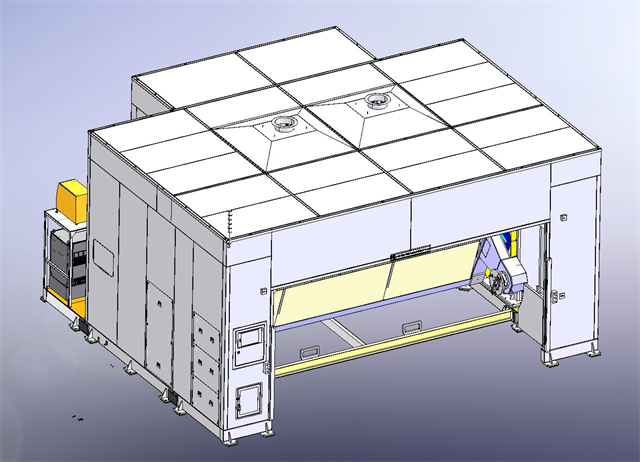
焊接机器人工作站具备超卓的作业效率。传统人工焊接受限于焊工体力与精力,难以长时间持续高超的工作。而工作站中的机器人可 24 小时不间断运行,其快速准确的动作响应,能极大缩短单件焊接时长。以汽车零部件焊接为例,人工焊接一个部件可能需数分钟,甚至更长时间,机器人工作站却能在短短几十秒内完成,且焊接节奏稳定。多工位协同作业模式,还可实现流水线般的高效生产,使整体产能呈倍数级增长,为企业大规模生产提供坚实保障。武汉激光切割工作站该弧焊工作站留存显卡接口固定件焊接的完整数据。
程序控制系统以工业控制器为中心,负责协调工作站各部件的运行逻辑。控制器内置多种焊接工艺数据库,包含不同材料、厚度对应的参数组合,操作人员可直接调用或进行微调。人机交互界面采用触摸显示屏,配备直观的图标与文字提示,支持参数设置、程序存储、历史记录查询等功能,操作流程简洁易懂。系统支持在线编程与离线编程两种模式,在线编程可通过示教器记录焊枪轨迹,离线编程则能在计算机上完成路径规划后导入控制器,提升编程效率。控制程序具备断点续焊功能,当设备意外停机后,可从暂停位置继续完成焊接作业。
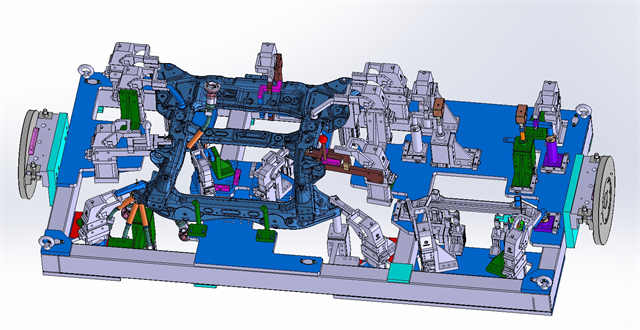
焊接电弧发生系统是弧焊工作站实现焊接作业的中心环节,主要由焊枪、电极与引弧装置构成。焊枪作为电弧产生的直接载体,其内部结构设计需满足电弧稳定燃烧的需求,通常配备导电嘴以保证电流的有效传输。电极的选择需依据焊接材料与工艺确定,常见的有熔化极与非熔化极两种类型,分别适用于不同的焊接场景。引弧装置则负责在电极与工件之间引燃电弧,通过高频高压或接触短路等方式实现,引弧过程的稳定性直接影响后续焊接的质量,该系统能快速建立稳定电弧,为焊接作业奠定基础。稳定夹持确保焊缝质量一致。
焊枪与送丝机构是弧焊机器人直接执行焊接作业的部件,其性能直接影响焊缝质量。焊枪采用耐高温材料制造,内部设有导电嘴和保护气体喷嘴,能稳定输出电流并形成气体保护罩,防止熔池被空气氧化。送丝机构由送丝电机、导丝管和焊丝盘组成,通过精密齿轮传动实现焊丝的均匀输送,送丝速度可根据焊接参数自动调节,确保焊丝与熔池的融合速度匹配。部分机构还配备了自动清理功能,定期去除焊枪喷嘴上的飞溅物,避免影响电弧稳定性。这种集成设计使焊枪和送丝机构能长期保持高效工作状态,减少维护频率。保护气体在电弧周围形成保护层。弧焊工作站生产
联网型弧焊工作站支持多设备协同焊接调度。武汉激光切割工作站
焊缝跟踪感知设备是弧焊机器人实现准确焊接的关键,能实时识别焊缝位置并引导焊枪调整轨迹。常见的设备包括激光传感器和视觉识别系统:激光传感器通过发射激光束扫描工件表面,根据反射光的变化计算焊缝的三维坐标;视觉识别系统则利用高清摄像头拍摄焊缝图像,通过算法分析提取焊缝的形状和位置信息。这些感知数据会实时传输给控制系统,系统根据偏差自动调整机械臂的运动参数,确保焊枪始终对准焊缝中心。即使工件存在微小变形或装配误差,该设备也能及时补偿,提高焊接质量的一致性。武汉激光切割工作站