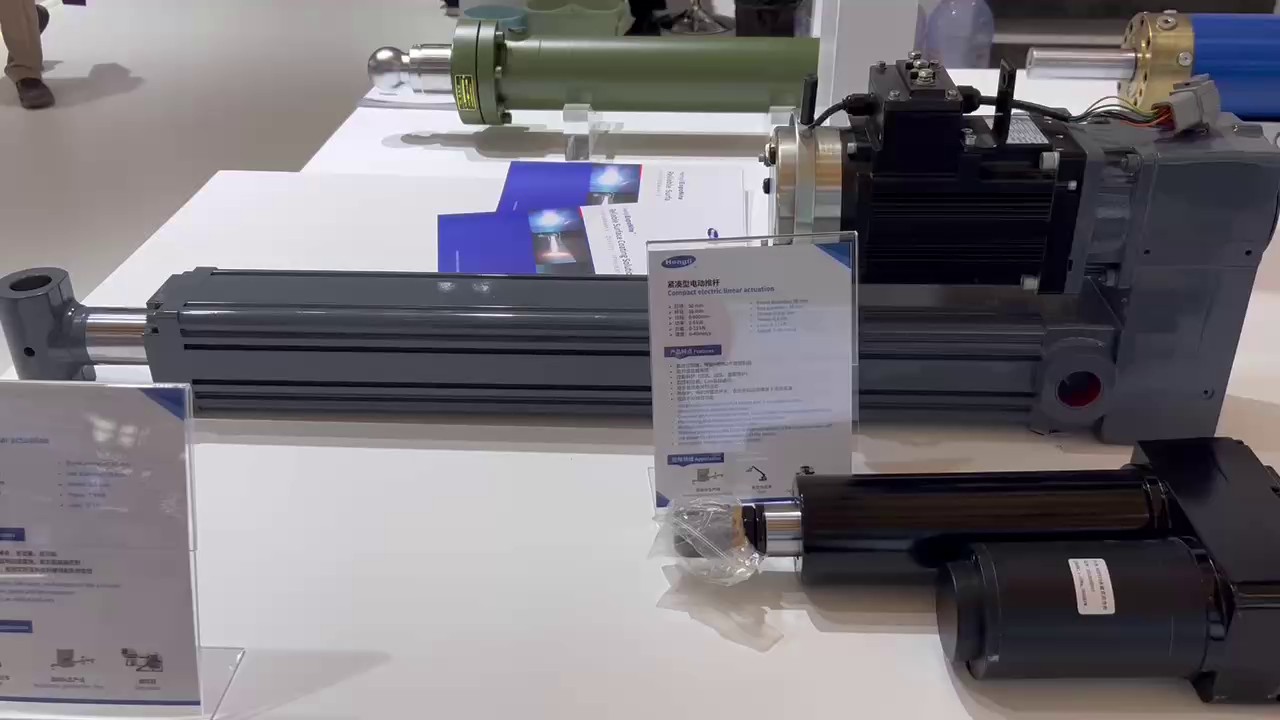
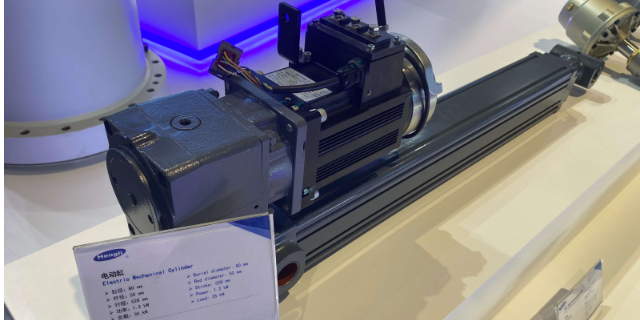
电缸的主体结构主要包括电动机、螺杆或滑块、导轨、传动装置和外壳等部分。其中,电动机是电缸的动力源,通过将电能转化为机械能来驱动螺杆或滑块进行直线运动。根据实际应用需求,可以选择合适的电动机类型和参数。螺杆或滑块是电缸的运动部件,与电动机相连,通过电动机的旋转运动实现直线运动。导轨、滑块和传动装置等部件共同组成了电缸的机械系统,用于支撑、导向和传递运动。外壳则是电缸的外部结构,起到保护和安装固定等作用。在电缸的结构中,还包括各种零部件,如轴承、联轴器、密封件、弹簧等。这些零部件对于保证电缸的性能和稳定性起着重要作用。例如,轴承可以支承电缸的旋转部件,联轴器则可以将电动机的动力传递给螺杆或滑块,密封件可以防止电缸内部的润滑油泄漏或外部灰尘进入,弹簧则可以起到缓冲和补偿的作用。总之,电缸的主体结构和各种零部件共同作用,实现了电缸的直线运动功能。根据实际应用需求,选择合适的电缸型号和参数,并进行正确的安装和维护,可以保证电缸的性能和稳定性。 电缸的运行效率高于许多传统的驱动方式。山东电缸大全
在半导体制造中,电缸的应用能够显著提高生产效率和产品质量。以下是一些具体的方式:快速定位和精确控制:电缸具有快速响应和精确控制的特点,能够快速准确地定位和移动半导体设备。在晶片加工、封装测试等环节中,电缸能够快速准确地定位和调整设备的位置和角度,提高生产效率。高精度和高重复性:电缸的精度和重复性很高,能够实现高精度的运动控制。在半导体制造中,对设备的精度要求极高,电缸的这种特性能够保证晶片加工、封装测试等环节的准确性和一致性,从而提高产品质量。自动化和智能化:电缸可以与其他自动化设备进行联动,实现自动化生产线。通过可编程控制器(PLC)等控制系统,可以精确控制电缸的运动轨迹和参数,实现智能化生产。这不*能够提高生产效率,还可以减少人为操作误差,提高产品质量。可靠性高和稳定性好:电缸具有较高的可靠性和稳定性,能够在长时间连续工作中保持稳定的性能。在半导体制造中,设备的可靠性和稳定性对于生产效率和产品质量至关重要,电缸的应用能够提高设备的可靠性和稳定性。 SMC电缸案例电缸的运作原理基于电机的旋转运动。
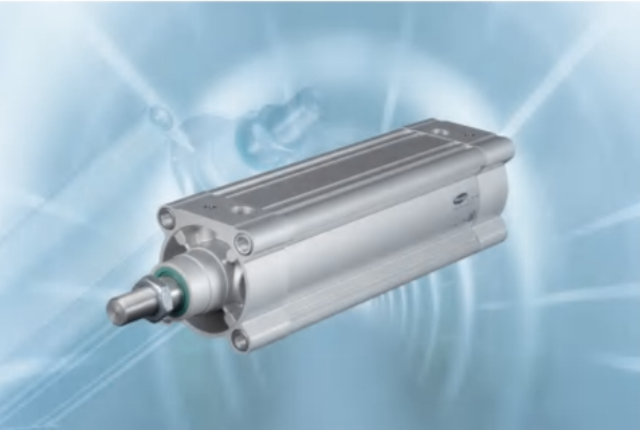
液压缸、气缸和电缸各有优缺点,适用于不同的应用场景。液压缸适用于大负载、高刚度和高精度的直线运动控制,具有输出力矩大、稳定性和可靠性高等优点,但需要定期维护,控制精度有限。气缸结构简单、成本低、适应性强,但输出力矩小,控制精度和稳定性有限。电缸控制精度高、响应速度快、适用于各种环境条件,但成本较高,需要定期维护。在实际应用中,应根据具体需求和场景选择合适的传动和控制方式。随着工业自动化和智能制造的发展,电缸的应用前景将更加广阔,其高精度、高速、大负载等优点将得到更广泛的应用。未来,随着技术的不断进步和应用需求的不断提高,液压缸、气缸和电缸将会不断创新和完善,更好地服务于工业自动化和智能制造领域。
在机器人领域,电缸的应用场景主要包括:工业机器人:电缸是工业机器人中常用的执行机构,能够实现机器人的线性运动控制。在工业生产线上,电缸驱动的机器人可以实现各种复杂的装配、搬运、焊接、涂装等任务,提高生产效率和产品质量。服务机器人:服务机器人在医疗、餐饮、家庭等场景中应用,而电缸作为服务机器人的重要执行机构,能够实现机器人的定位和运动控制。例如,在医疗领域,电缸驱动的机器人可以实现手术过程中的精细操作,提高手术成功率。特种机器人:特种机器人如水下机器人、太空机器人等,需要在特殊环境中进行高精度和高可靠性的运动控制。电缸作为特种机器人的重要执行机构,能够提供稳定可靠的动力输出,实现机器人在特殊环境中的精确操作。综上所述,电缸在机器人领域的应用场景非常广,包括工业机器人、服务机器人和特种机器人等。通过电缸的精确运动控制,可以实现机器人的各种复杂操作,提高生产效率、减少人工操作和提高生活质量。 电缸的行程长度可以根据需求定制。

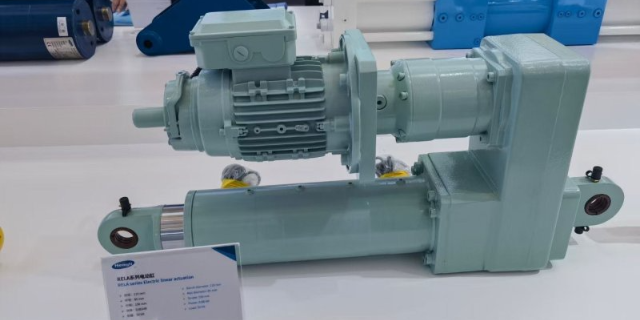
伺服电缸的模块化主要体现在其设计上,将伺服电机与丝杠一体化,使得产品更加紧凑和模块化,方便用户根据实际需求进行选择和配置。这种模块化的设计方式可以提高设备的可维护性和可扩展性,降低用户的维护成本和使用成本。而伺服电缸的智能化主要体现在其控制系统上,采用先进的控制算法和传感器技术,实现对电缸的精确控制和智能监控。例如,通过集成传感器和执行器,伺服电缸可以自感知、自适应、自调整等功能,提高其智能化水平和适应性。这种智能化的控制方式可以提高设备的自动化程度和生产效率,降低人工操作成本和误差。综上所述,伺服电缸的模块化和智能化是相辅相成的,模块化设计使得伺服电缸更加紧凑和易于配置,而智能化控制则提高了设备的自动化程度和生产效率。未来,随着技术的不断进步和应用需求的不断提高,伺服电缸的模块化和智能化水平将进一步提升,为用户提供更加高效、可靠的解决方案。 电缸的模块化设计提高了系统的可扩展性。山东电缸大全
电缸的低噪音特性使其适用于需要安静环境的场所。山东电缸大全
电缸实时调整运动参数主要依赖于其内置的控制系统和传感器。以下是具体的实现方式:传感器反馈:电缸通常配备有多种传感器,如位置传感器、速度传感器和力传感器等。这些传感器能够实时监测电缸的运动状态和外部负载变化,并将这些信息反馈给控制系统。控制系统处理:控制系统接收到传感器的反馈信号后,会进行实时处理和分析。通过与预设的运动参数进行比较,控制系统能够计算出需要调整的参数值,以确保电缸按照预定的轨迹和要求进行运动。调整输出信号:控制系统根据计算结果,调整输出给电缸的驱动信号。这些驱动信号可以是电流、电压或脉冲信号等,用于控制电缸的电机转动,从而调整其位置、速度和加速度等运动参数。实时响应:电缸的驱动系统接收到调整后的驱动信号后,会立即作出响应,使电缸按照新的运动参数进行运动。由于控制系统的实时性和电缸的快速响应性,这种参数调整可以在非常短的时间内完成,从而实现实时调整运动参数的效果。综上所述,电缸通过传感器反馈、控制系统处理、调整输出信号和实时响应等步骤,实现运动参数的实时调整。这种能力使得电缸能够适应不同的工作场景和需求,提供精确、快速和可靠的运动控制。 山东电缸大全