- 品牌
- 隼星传感
- 型号
- 齐全
数字激光位移计方案开发有哪些需要注意的问题?智能激光位移计的应用。1、尺寸测定:微小的位置识别;传送带上有无零件的监测;材料重叠和覆盖的探测;机械手位置的控制;器件状态检测;器件位置的探测(通过小孔);液位的监测;厚度的测量;振动分析;碰撞试验测量;汽车相关试验等。2、金属薄片和薄板的厚度测量:激光位移计测量金属薄片(薄板)的厚度。厚度的变化检出可以帮助发现皱纹,小洞或者重叠,以避免机器发生故障。3、气缸筒的测量,同时测量:角度,长度,内、外直径偏心度,圆锥度2,同心度以及表面轮廓。电子位移计通过测杆长度变化改变滑动变阻器的电阻,从而改变各测值。佛山振弦式埋入式位移计公司
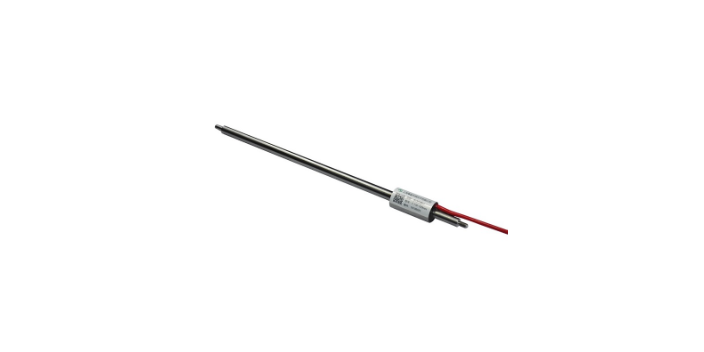
关于振弦式贴片式位移计你不得不知道的事。仪器的安装。仪器安装就位后,应记录读数、位置和编号(编号由用户自己确定)。如需调整,应小心进行,以使仪器监测范围符合设计要求。初步检查验收。在验收时使用读数仪对仪器的读数进行检查,此外仪器在运输中会因挤压振动的作用读数会偏离这个范围,这并不影响仪器的使用。同时由于仪器两端未固定,位移计自由状态下的读数可能表现不稳定,这是正常的,仪器安装固定后读数即会稳定。电缆线的加长。因为振弦仪器的输出信号是频率,所以电缆电阻细微的变化、电缆的连接加长,不会影响读数仪对仪器的读数。标准钢筋计在出厂时配备2m电然,安装前,需根据现场情况进行连接加长。埋设在土体中的电缆应尽可能避免接头。如无法避免电缆连接,应采用防水接头,推荐采用ES-3型热缩接头,也可使用环氧接头。单点位移计行情光纤光栅位移计主要由一个关键弹性结构、弹簧、连接杆构成,连接杆连接待测件。

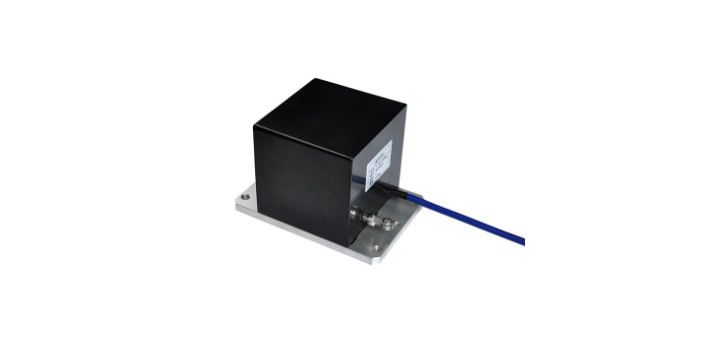
三向位移计探头采用球锥定位原理来测量测管上的标记,而且传感器精度很高,在每次测量前后进行定期校准,可达到非常高的测量精度和长期稳定性。球锥定位原理:探头的球状顶端和环形锥状的测量标记,确保测量时探头的长度精确为1米。三向位移计测量沿垂直测线的位移矢量的三个正交分量Δx,Δy和Δz。Δx和Δy的测量精度为±0.04mm/m,Δz的测量精度为±0.002mm/m。三向位移计用途:用于高精度地测量垂直钻孔及岩石、混凝土或土壤中测线的轴向和径向位移。可应用于:1、混凝土坝:研究大坝和岩石坝肩之间的相互作用,例如库水位变化的影响。测量了解完整的垂直应变和水平位移的分布情况。2、隧道和竖井:测量垂直和水平位移。在城市隧道施工中对沉降机理的研究。3、桩和连续墙:测量沿垂直测线的应变分布和水平位移。
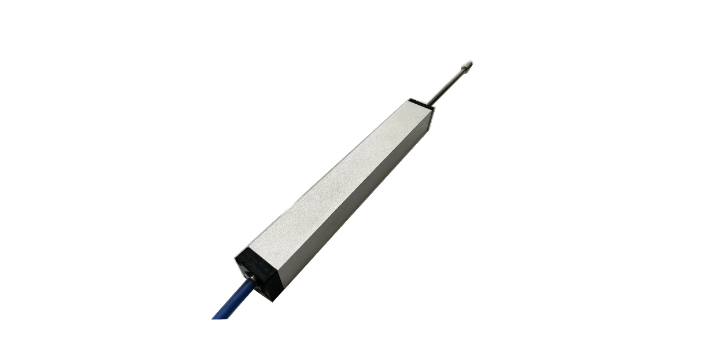
安装振弦式表面位移计的时候应该注意什么?钢结构表面安装振弦式表面位移计时要的注意事项。T-900系列位移计在钢结构上安装时,通常采用焊接安装块的方式。安装时,要保证位移计不受电流和高温影响,否则位移计将损坏。因此,位移计的安装应在焊接工作全部完成后进行,即先焊接安装块,再安装位移计。安装块由厂家成对提供,并附带螺丝。焊接前先将待测点表面清理干净,借助模拟位移计回定安装端块位置,焊接后拆除模拟位移计,再穿入应变针。请注意,穿入应变针后将卡箍预先套入。焊接时应避免过热,不能焊接平直端面,否则将影响仪器的拆装。焊接完成后,可以使用湿毛巾对安装块降温并去除焊渣,检查调整两端块是否同心。将线圈卡在位移计中部,将卡箍套在线圈上拧紧。位移计在室内环境污染比较严重时,比如灰尘比较大的环境,用户应加装防护装置。
拉线式位移计适用于边坡、裂缝、桥梁、建筑、软基等沉降观测。拉线式位移计采用传感器与张拉线结合方式,通过机械位移量的转换得出应变量。其内部的机械机构主要由恒力弹簧、弹簧轮、测轮、轮轴等组成,该传感器结构合理,安装简便、抗干扰能力强,分辨率高,量程大,寿命长,集检测与A/D转换为一体,有掉电后信号跟踪记忆功能。它能够长期用于被测件位移量的检测,并能保证性能的稳定可靠。适合边坡位移、滑坡体监测、测点与基点位移监测,同时还对各类闸门(平板门、弧形门、人字门、门机、桥机等)的起吊高度进行测量,控制。是江河湖泊、水库、船闸、水电站、水文站、水厂及石油化工等行业理想测量与控制位移的传感器。位移计实时采集监测点的地面位移状况;倾角测量精度为0.1°。福州地铁位移计公司
多点位移计主要由锚头、传递杆、护管、支承架、传感器、护罩以及灌浆管组成。佛山振弦式埋入式位移计公司
振弦式多点位移计主要由位移传感器及护管、不锈钢测杆及PVC护管、安装基座、护管连接座、锚头、护罩、信号传输电缆等组成。当被测结构物发生位移变形时将会通过多点位移计的锚头带动测杆,测杆再拉动位移计的拉杆产生位移变形。位移计拉杆的位移变形传递给振弦转变成振弦应力的变化,从而改变振弦的振动频率。电磁线圈激振振弦并测量其振动频率,频率信号经电缆传输至读数装置,即可测出被测结构物的变形量。振弦式多点位移计可同步测量埋设点的温度值。佛山振弦式埋入式位移计公司

LVDT位移计结构与性能分析。LVDT位移计差动变压器结构设计决定了其存在以下问题:1、为了获得较高的线性,LVDT位移计的量程通常只占线圈长度的几分之一,这导致位移计安装尺寸相对较大。自动化测控系统通常集成大量的位移计与其他元器件,如果要很好地利用空间,就要求位移计体积越小越好;2、LVDT位移计量程越大,线性度相对越低。当位移计精度降低到一定水平,测量便失去了意义。因此LVDT位移计适用于微位移精密测量场合,很少用于大量程位移测量;3、LVDT位移计因为铁芯惯性大、频响低、损耗大,无法用于快速动态信号测量;4、LVDT位移计分辨率与测量范围有关,测量范围越大,位移计分辨率越低;5、LVDT...
- 重庆振弦式表面位移计量程 2026-03-04
- 成都振弦式表面位移计型号 2026-03-04
- 上海三向位移计工作温度 2026-03-04
- 南昌地铁位移计供应商 2026-03-04
- 武汉三向位移计输出方式 2026-03-04
- 振弦式表面位移计使用方法 2026-03-04
- 沈阳智能位移计精度 2026-03-03
- 东莞单点位移计哪家好 2026-03-03
- 成都单点位移计线性度 2026-03-03
- 北京裂缝位移计行情 2026-03-03

- 济南多点位移计参数 2026-03-02
- 深圳钢丝水平位移计 2026-03-02
- 南昌数字式顶出位移计现货供应 2026-03-02
- 沈阳高可靠性位移计线性度 2026-03-02
- 郑州顶出位移计厂家 2026-03-02
- 苏州三向位移计精度 2026-03-02



- 武汉三向位移计输出方式 03-04
- 振弦式表面位移计使用方法 03-04
- 沈阳智能位移计精度 03-03
- 东莞单点位移计哪家好 03-03
- 成都单点位移计线性度 03-03
- 北京裂缝位移计行情 03-03
- 昆明钢丝水平位移计公司 03-03
- 贵阳CCD型位移计线性度 03-03
- 青岛三向位移计参数 03-03
- 厦门高精度位移计厂家直销 03-02