五金件(螺丝)螺纹检测检测对象:螺丝螺纹检测检测要求:横面螺纹弧度检测高精度解决方案:DTCM125-26-AL(DTCM系列双远心镜头)+DTCL-26-1W-G(远心平行背光源)+1/2.5"5M相机检测结果:视野的中心及边缘的分辨率一致,且畸变极低(0.06%);搭配平行背光源,比起传统的平板...
视觉镜头基本参数
- 品牌
- 海康,华睿,灵猴
- 型号
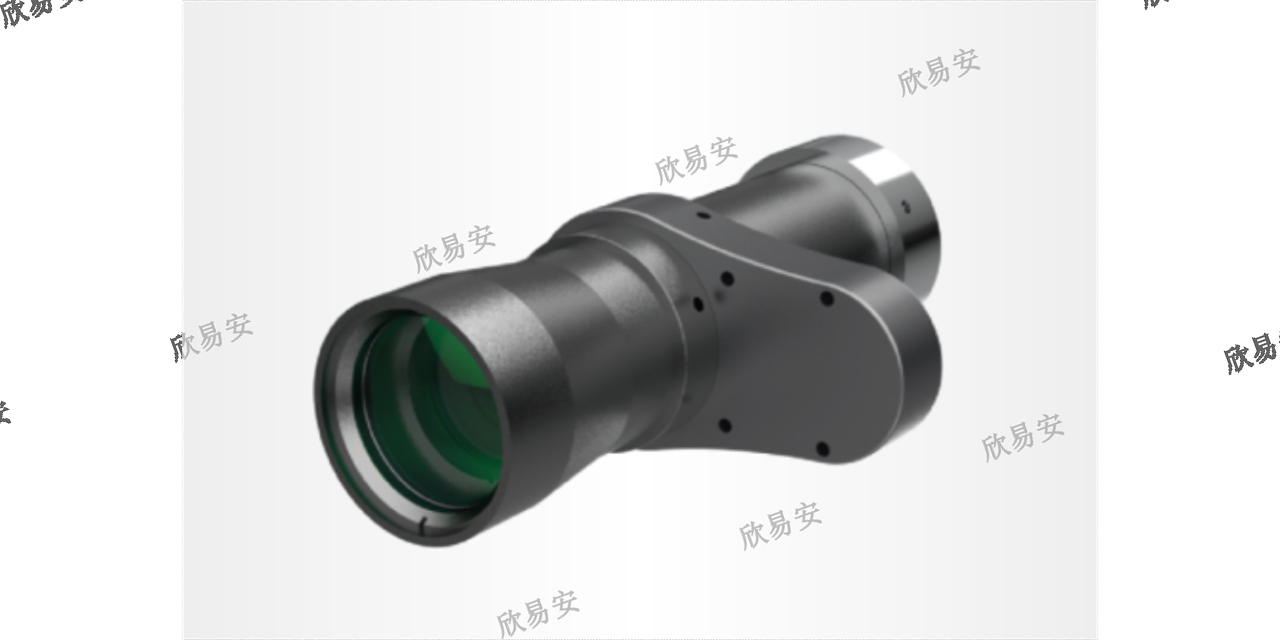
- 液态镜头
- 产地
- 苏州
- 是否定制
- 是
视觉镜头企业商机
在医疗器械制造行业,FA 视觉镜头保障着产品的高质量与安全性。在手术器械的生产过程中,它对器械的刃口锋利度、表面粗糙度以及装配精度等进行严格检测。视觉镜头能够放大观察器械的细微结构,确保每一把手术刀都符合精确的尺寸标准,避免因制造缺陷而影响手术效果。在医疗器械的包装环节,FA 视觉镜头检查包装的完整性,防止有异物混入或者密封不严等情况发生。其严谨的检测能力为医疗器械的质量把控奠定了坚实基础,从而保障了患者在医疗过程中的安全与健康。机器视觉镜头可以通过调节焦距和光圈来实现不同拍摄效果。扬州360视觉镜头生产企业
前端的主流方法有特征点法(间接法)和直接法两种。特征点由关键点和描述子两部分组成,关键点是指该特征点在图像中的位置,它可以在多帧图像中被检测到,并通过比较描述子来建立配对关系,通过**小化重投影误差来优化相机位姿,**经典的间接法是orb-SLAM2。直接法没有特征提取的步骤,直接利用像素的灰度信息,通过**小化像素的光度误差来优化位姿,**经典的直接法是DSO。间接法和直接法的理论基础已经较为完善,目前的改进方向就是在已有的理论框架中增加先验约束如:尺度约束,平面特征约束,平行线特征约束等,2022年美团在ICRA学术会议上发表的工作《EDPLVO:EfficientDirectPoint-LineVisualOdometry》即对前端做了改进,将线特征扩展到直接法中,获得了比较好导航论文奖。宿迁视觉镜头怎么样机器视觉镜头的光圈调节可以实现不同光线条件下的拍摄。
汽车作为现代生活必不可少的工具,它的每一个零部件都关系着一辆汽车的性能、质量,关系着它的安全性,所以对汽车零部件的检测是制造中一步至关重要的环节,视觉系统(特别是双远心镜头)起到了重要的作用。
检测对象:汽车发动机保险丝盒塑料框架检测要求:检测有无多胶缺胶检出**小0.1mm的缺陷视野150*100
解决方案:DTCM35FH-240H-AL(DTCM系列双远心镜头)+DTCL-240-1W-G+29M全画幅相机
成果:检测良品率98.5%,检测时间为2S/1PCS,**提高工作效率。
UL 认证视觉镜头在教育领域的多媒体教学中发挥着积极作用。在教室的投影仪或电子白板系统中,它能够呈现出清晰、鲜艳的图像与视频内容。其符合 UL 认证的光学素质保证了不同角度观看时画面的一致性与清晰度,让每一位学生都能获得良好的视觉体验。在科学实验教学中,它可以连接显微镜或其他实验观测设备,将微观的实验现象放大并展示在大屏幕上,使学生更直观地理解科学原理与实验过程。无论是展示历史文化图片、地理景观图像还是科学实验演示,UL 认证视觉镜头都极大地丰富了教学资源,提升了教学效果。工业变倍镜头广泛应用于机械制造、电子制造等行业。它可以帮助工人更清晰地观察和检查微小的细节。
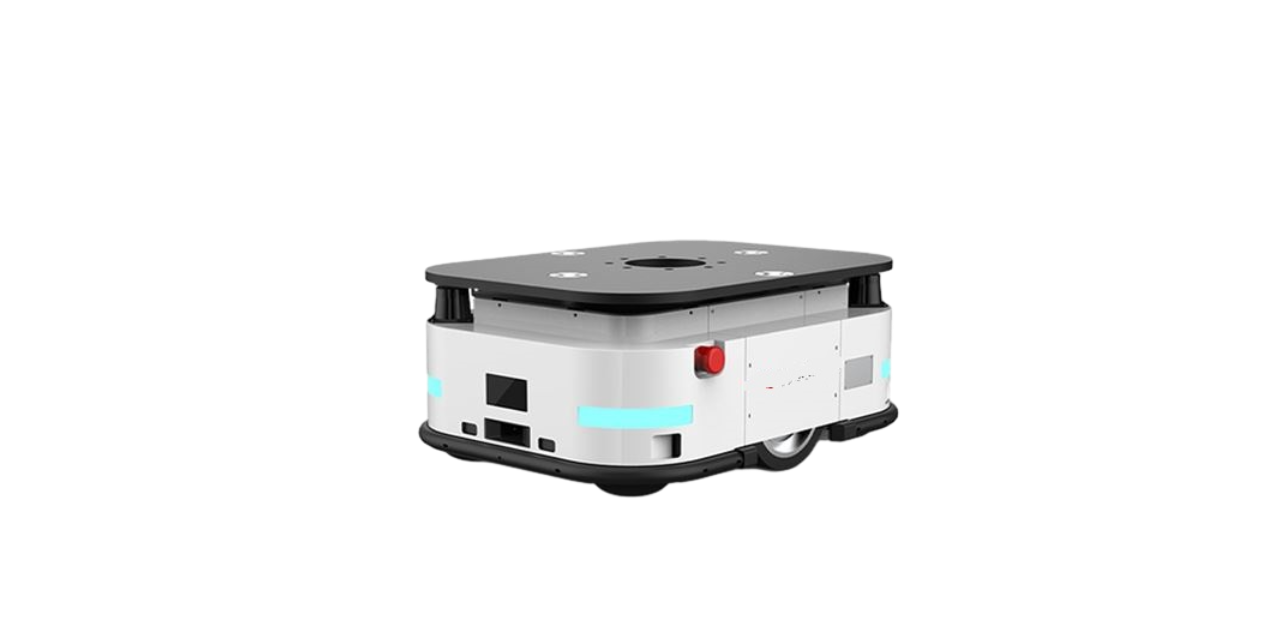
AGV(自动导引车)的视觉镜头是其智能化运行的**部件之一。这款镜头采用高精度光学设计,能够实时捕捉周围环境的高清图像。通过先进的图像识别算法,它不*能够准确识别路径、障碍物,还能对复杂环境进行快速响应。在工厂、仓库等应用场景中,AGV视觉镜头的精细性和稳定性确保了物流运输的高效与安全,为工业自动化提供了强有力的技术支持。AGV(自动导引车)的视觉镜头,作为其**感知部件,拥有***的图像捕捉和解析能力。它采用高精度光学设计,能够实时捕捉环境信息,并通过先进的图像处理算法,迅速分析出路径、障碍物等关键信息。在复杂的工业环境中,AGV视觉镜头凭借其出色的稳定性和可靠性,为自动导航和定位提供了强有力的保障,确保AGV能够高效、准确地完成各项任务。工业FA镜头具有防尘、防水和耐用的特性,适合恶劣的工业环境,它可与各种工业相机和图像处理系统配合使用。金山区360视觉镜头对比
机器视觉镜头的镜头结构包括透镜、光圈、焦距等部分。扬州360视觉镜头生产企业
SLAM(SimultaneousLocalizationandMapping),也就是同时定位与地图构建,它是指搭载特定传感器的车辆、无人机等移动机器人,在没有环境先验信息(什么是先验信息?可以自己查一下)的情况下,在运动过程中,估计自己的运动状态,同时建立环境模型的一系列任务。目前大家接触比较多的,已经将SLAM技术应用于实际生活中的,就是扫地机器人了。我们来想一下:扫地机器人来到一个陌生的环境后,是怎样去清扫一个垃圾呢?一个直观的想法就是机器人先确定自己的位置,然后确定垃圾相对于自身的位置,这样就有了一个起点和终点,机器人只需要从起点移动到终点就能清扫这个垃圾了。但是这是很直观的想法,而这个想法的前提是:我们清楚房间的地图构造,这样我们才能更好地完成垃圾清扫的任务。所以扫地机器人需要完成的流程应该是:了解自己周围的环境,构建房间地图,确认自己与垃圾的位置,然后规划路线,移动过去,完成清扫。而这整个流程中,构建地图、进行自身的定位,就是咱们SLAM的主要任务了。扬州360视觉镜头生产企业
与视觉镜头相关的文章

闵行区FA视觉镜头供应商
- 温州特种远心视觉镜头供应商 2025-11-24
- 淮南UR认证视觉镜头供应商 2025-11-24
- 工业视觉镜头特点 2025-11-24
- 浙江工业视觉镜头设备厂家 2025-11-23
- 湖州特种远心视觉镜头种类 2025-11-23
- 青浦区FA视觉镜头商家 2025-11-23
- 浙江视觉镜头一般多少钱 2025-11-23
- 徐州特种远心视觉镜头一般多少钱 2025-11-23
- 温州UR认证视觉镜头 2025-11-22
- 松江区FA视觉镜头种类 2025-11-22
- 苏州变倍视觉镜头特点 2025-11-22
- 安庆特种远心视觉镜头商家 2025-11-22
与视觉镜头相关的产品
与视觉镜头相关的新闻
-
滁州360视觉镜头种类 2025-11-21 10:04:59镜头相当于充当晶状体这一环节,简而言之,镜头主要的作用就是聚光。为什么要聚光?比如说在大晴天用放大镜生火,你会发现阳光透过放大镜聚集到一点上,也就是说,想通过一块小面积的芯片去承载这么一片区域就不得不使用镜头聚焦。焦距是从镜头的中心点到胶平面上所形成的清晰影像之间的距离。焦距的大小决定着视角的大小,...
-
金山区视觉镜头生产企业 2025-11-21 07:04:59在商业摄影与广告制作领域,UL认证视觉镜头是创造视觉作品的利器。专业摄影师青睐其出色的色彩还原能力与细腻的成像效果,通过它可以拍摄出极具视觉冲击力的产品照片、人物肖像以及风景画面。在广告拍摄中,UL认证视觉镜头能够精细地捕捉产品的细节与特色,配合灯光与布景,将产品的魅力完美展现给消费者。其稳定的性能...
-
浙江电池包视觉镜头价格表 2025-11-20 00:15:11镜头相当于充当晶状体这一环节,简而言之,镜头主要的作用就是聚光。为什么要聚光?比如说在大晴天用放大镜生火,你会发现阳光透过放大镜聚集到一点上,也就是说,想通过一块小面积的芯片去承载这么一片区域就不得不使用镜头聚焦。焦距是从镜头的中心点到胶平面上所形成的清晰影像之间的距离。焦距的大小决定着视角的大小,...
-
福建电池包视觉镜头价格表 2025-11-20 02:04:50在精密机械制造中,FA视觉镜头是不可或缺的监测利器。它以其稳定性和准确性,对机械零部件的加工过程进行实时监控。例如在汽车发动机零部件的生产中,FA视觉镜头可以精确测量活塞的直径、圆柱度等关键尺寸参数。在加工过程中,它时刻关注着刀具与工件的相对位置,一旦发现偏差,立即反馈给控制系统进行调整。其高速的拍...
与视觉镜头相关的问题
新闻资讯
产品推荐
-

安庆AMR怎么样
2026-01-25 -

黄山快递AMR
2026-01-25 -

蚌埠快递AMR设备厂家
2026-01-25 -

滁州CE认证AMR生产企业
2026-01-25 -
苏州激光导航AMR生产企业
2026-01-24 -
盐城CE认证AMR供应商
2026-01-24 -
江苏AMR种类
2026-01-24 -
苏州商用AMR供应商
2026-01-24 -
上海室外AMR商家
2026-01-24