- 品牌
- 深圳市天盛德隆科技有限公司
- 型号
- 齐全
ADAS驾驶辅助设备可以记录行车轨迹和速度等信息。这些设备通过利用先进的传感器、摄像头、雷达等技术,实时监测和分析车辆周围环境,不只能够提供驾驶员警告、辅助驾驶和自动化驾驶功能,还能够记录车辆的行驶轨迹、车速、加速度、刹车状态、转弯角度等信息。这些记录的信息对于提高汽车的安全性、可靠性,减少交通事故,以及提供更加舒适和便利的驾驶体验都起着重要的作用。同时,通过无线网络传输到远程服务器进行存储和分析,这些信息还可以用于后续的事故责任判断与证明,以及帮助驾驶员更好地了解自己的驾驶习惯,从而提高驾驶水平。安装了ADAS的车辆,在夜间行驶时也能保持清晰的视野。合肥ADSA驾驶辅助设备价格
ADAS驾驶辅助设备进行交通标志识别主要通过以下几个步骤实现:图像采集:首先,设备利用前置摄像头等传感器捕捉道路前方的图像。这些摄像头通常安装在车辆的前部,能够清晰地捕捉到道路标志和交通信号。图像处理:采集到的图像随后会经过一系列图像处理算法。这些算法需要包括颜色识别、形状识别、边缘检测等,以从图像中提取出与交通标志相关的信息。标志识别:经过处理后,系统会尝试识别图像中的交通标志。这通常涉及到与预设的交通标志模板进行比对,或者利用机器学习算法进行模式识别。系统能够识别多种类型的交通标志,如限速标志、禁止进入标志、停止标志以及让行标志等。合肥ADSA驾驶辅助设备价格ADAS驾驶辅助设备的智能限速功能,避免了超速行驶的风险。
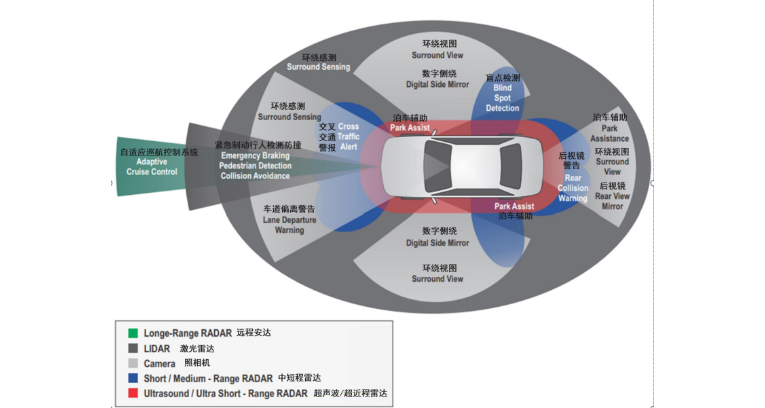
自动泊车系统通过一系列先进的技术和功能,帮助驾驶员完成泊车过程,明显提高泊车的便捷性和安全性。以下是自动泊车系统如何工作的主要方面:环境感知与停车位检测:自动泊车系统利用安装在车辆四周的雷达、摄像头和超声波传感器等设备,实时感知周围环境。这些传感器能够测量车辆与周围物体的距离和角度,并识别可用的停车位。无论是平行式、垂直式还是斜列式停车位,系统都能准确检测并评估其适用性。泊车路径规划:一旦检测到合适的停车位,自动泊车系统会立即开始规划泊车路径。它根据车辆当前的位置、停车位的大小和形状,以及周围环境的信息,计算出一条较好的泊车轨迹。这一过程中,系统会考虑到各种潜在障碍物和其他车辆,以确保泊车的安全性。
盲点检测系统的准确度和范围主要受到系统设计和使用的传感器类型的影响。一般来说,现代盲点检测系统采用了先进的传感器技术和算法,具有较高的准确度和较广的检测范围。在准确度方面,盲点检测系统通常利用雷达、摄像头等传感器来监测车辆两侧的盲区。这些传感器能够实时获取周围环境的信息,并通过算法对目标进行识别、跟踪和分类。系统通过比对传感器数据和车辆状态信息,能够较为准确地判断是否存在潜在的危险目标,并及时向驾驶者发出警告。在范围方面,盲点检测系统的检测范围通常涵盖了车辆侧后方的一定区域。具体的检测范围需要因车型和传感器配置的不同而有所差异。一些高级系统甚至能够检测到更远处的目标,提供更多方面的保护。ADAS驾驶辅助设备的智能巡航功能,让行车更加平稳。

ADAS驾驶辅助设备与其他车载系统的兼容性是一个复杂的问题,它受到多种因素的影响,包括不同制造商的标准、系统的硬件和软件架构,以及车辆的电气和机械结构等。首先,现代车载系统越来越注重标准化和模块化设计,这有助于提高不同系统之间的兼容性。许多汽车制造商在设计和生产车辆时,会考虑到不同车载系统之间的互操作性,确保它们能够相互协调、共同工作。其次,ADAS驾驶辅助设备通常具有较为开放的数据接口和通信协议,这使得它们能够与其他车载系统进行数据传输和交互。例如,ADAS系统可以与导航系统共享道路和交通信息,以实现更智能的路线规划和驾驶辅助;同时,它也可以与车载娱乐系统连接,提供多媒体娱乐功能。这款ADAS设备采用了高精度传感器,确保了数据的准确性和可靠性。合肥ADSA驾驶辅助设备价格
ADAS设备可以实时监测驾驶员的疲劳程度,确保行车安全。合肥ADSA驾驶辅助设备价格
ADAS驾驶辅助设备通过利用多种传感器和先进的算法来区分静态和动态物体。这些传感器包括毫米波雷达、激光雷达、摄像头等,它们能够实时感知周围环境并收集数据。在区分静态和动态物体时,ADAS设备主要依靠物体在环境中的运动状态和变化特征。静态物体指的是那些位置相对固定的物体,如道路标志、路灯、树木等。这些物体在传感器获取的数据中通常表现为相对稳定的图像或信号特征。相比之下,动态物体则是指那些位置或状态在不断变化的物体,如车辆、行人、自行车等。这些物体在传感器获取的数据中会呈现出明显的运动轨迹或速度变化。合肥ADSA驾驶辅助设备价格
- 山西ADAS标定设备哪家好 2024-07-11
- 湖南智能驾驶辅助设备 2024-07-09
- 江门ADAS标定设备好处 2024-07-08
- 深圳驾驶辅助设备多少钱 2024-07-07
- 盐城智能驾驶辅助设备促销价格 2024-07-04
- 四川驾驶辅助设备在线询价 2024-07-03
- 天津ADSA驾驶辅助设备厂家直销 2024-07-03
- 杭州智能驾驶辅助设备促销价格 2024-07-03
- 汕尾自动驾驶辅助设备促销价格 2024-07-02
- 韶关驾驶辅助设备好处 2024-06-30
- 辽宁ADSA驾驶辅助设备介绍 2024-06-27
- 汕头自动驾驶辅助设备解决方案 2024-06-27