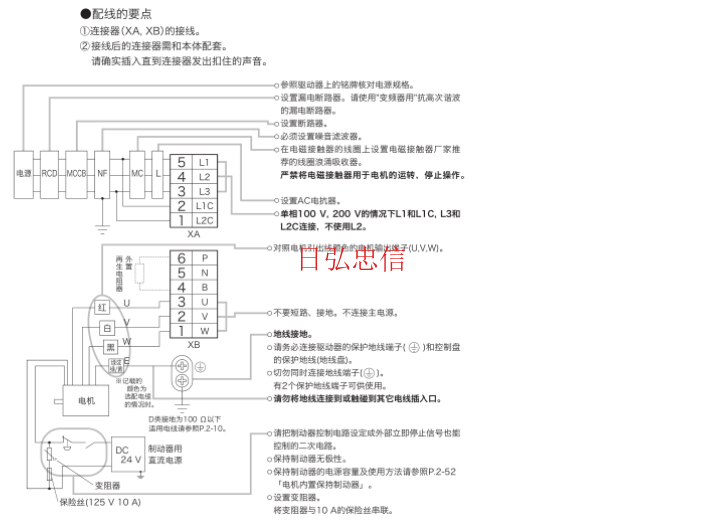
松下伺服电机-外部位移传感器
ABZ并行外部位移传感器・Z相是通过从ABZ并行外部位移传感器的输入的Z信号作为输出。(未分频)・通过设置Pr6.22「AB相外部位移传感器脉冲输出方法选择」=1,AB相的信号可从驱动器内部读出,AB相的信号可再生。此情况时,与Pr6.22=0时相比,会产生AB相的再生延迟。
外部位移传感器的共通项目・从外部位移传感器的移动量来看Z相信号宽度过窄不能检测的情况下,通过Pr6.20「外部位移传感器Z相设定」设定Z相信号输出时间,**短可以输出此时间的Z相。尚且,为了能输出从Z相信号的启动到设定的时间,实际的Z相信号宽度会有不同,请注意。或如下图所示,根据动作方向,时间扩张的方向会有变化。请注意。 松下伺服电机驱动器16.0报警原因解决办法。珠海松下伺服电机烧坏原因
松下伺服电机-位置指令滤波功能
*1针对实际的滤波器时间常数(设定值×0.1ms),不到100ms时,***误差比较大为0.4ms,20ms以上时相对误差比较大为0.2%。*2Pr2.22「位置指令平滑滤波器」的切换,在定位完成输出中,且每隔一定时间(0.166ms)的指令脉冲从0状态转换为0以外的状态的指令启动时进行。特别是将滤波器时间常数设小,定位完成范围设大时,在上述时刻滤波器里有累积脉冲残留(从滤波前的位置指令减去滤波后的位置指令的值通过时间的积分面积),在切换后会急速回到原来的位置,所以电机会以高于之前的指令速度进行运转,请注意。*3变更Pr2.22「位置指令平滑滤波器」之后,到适用于内部计算为止可能出现延迟,且在这个期间若*2的切换时机到来,变更有可能被保留。 徐州松下伺服电机说明书松下伺服电机刚性调节。

A6松下伺服电机:Moddbus数据结构
发送命令(主站→从站)从站地址(1byte)功能码(1byte)数据(0~252byte)CRC(2byte)从站地址00h广播地址01h~F7h从站地址功能码功能码功能内容01h读取线圈读取线圈信息。03h读取寄存器读取监视器、参数等的寄存器。05h写入线圈向线圈写入。06h写入寄存器向寄存器写入。08h通信诊断回环测试0Fh写入复数线圈向复数的线圈写入。10h写入复数寄存器向复数的寄存器写入。数据由于功能码不同而有所不同。No.SX-ZSV00015-12-R2.1松下电器产业株式会社马达经营单位MotorBusinessUnit,PanasonicCorporationCRCModbus-RTU使用CRC(循环冗余检查CyclicRedundancyCheck)进行纠错。CRC码使用CRC1-16(X16+X15+X2+1)的生成多项式计算得出。1.CRC生产顺序1)CRC的初始值设置为FFFFh。2)计**令的较早字节数据(从站地址)和CRC的XOR,将其结果设定为CRC。3)CRC右移1bit。4)根据3)的右移移出位为0时,重复3);如果移出位为1时,将A001h和CRC进行异或,其結果设置为CRC,返回至3)。5)3)和4)反复进行8次右移。6)命令的下一个字节也同样从2)到5)进行反复处理。7)将命令的所有字节的完成上述操作后得到纠错的CRC。8)在命令的***附加
松下伺服电机-位置指令滤波功能
如希望分倍频(电子齿轮)后的位置指令平滑,设定指令滤波器。■关联参数分类No.参数名称设定范围单位功能222指令平滑滤波器0~100000.1ms设定位置指令对应的1次延迟滤波器的时间常数。2自由度控制时,作为指令响应滤波器使用。详细相关请参照5-2-15「2自由控制模式(位置控制时)」5-2-17「2自由控制模式(速度控制时)」。223指令FIR滤波器0~100000.1ms设定位置指令对应的FIR滤波器的时间常数。・Pr2.22「指令平滑滤波器」相关针对目标速度Vc的方波指令,如下图所示设定1次延迟滤波器的时间常数。 松下伺服750w电机的轴径。

松下伺服电机-外部位移传感器的脉冲再生功能
串行***式外部位移传感器・Z相与驱动器的控制电源接通后,外部位移传感器的***位置横穿过零点时,***输出。此位置以Pr6.21设定的A相脉冲间隔为基准输出Z相。但Pr6.21=0时,*在***位置零点输出Z相。■串行增量式部位移传感器(株式会社Magnescale外部位移传感器制SR75,SR85)・Z相是通过串行增量式外部位移传感器的Z相输出(未分频)。或Z相通过的方向会有如下图所示的不同,请注意。
1Z相位置与A相,B相的关系根据外部位移传感器不同。以上图为例。*2Z相是再生了外部位移传感器原信号的1个脉冲。宽度较窄时,通过Pr6.20「外部位移传感器Z相设定」可以延长输出时间。*3Z相作为控制信号使用时,速度需在外部位移传感器分辨率基准(脉冲分频前)15Mpulse/s以下。在此速度以上的情况,有不能正确输出Z相的情况。例)外部位移传感器分辨率0.1μm的情况,15Mpulse/s时的速度[m/s]为下述所示。15000000[pulse/s]×0.1μm=1.5m/sZ相信号请在速度为1.5m/s以下的状态使用。*4在Z相上接通电源时,此处的位置并不能被输出为Z相。需要动作一次,通过检出位移传感器侧的Z相的边沿输出Z相。 MSMF/MHMF502L1H6M低惯量/高惯量5KW刹车电机。山东松下伺服电机使用手册
松下伺服电机驱动器A6选型手册。珠海松下伺服电机烧坏原因
A6松下伺服电机 Modbus通信规格
Modbus通信规格2-1-1通信线路的连接(1)使用RS-232物理层的情况将Pr5.37「Modbus连接设置」设置为1,可通过RS232进行1:1的Modbus通信。X2RXDTXDGNDTXDRXDGND上位控制器伺服驱动器RS232接口SN751701同等品431No.SX-ZSV00015-5-R2.1松下电器产业株式会社马达经营单位MotorBusinessUnit,PanasonicCorporation(2)使用RS-485的物理层的情况将Pr5.37「Modbus连接设置」设置为2,可通过RS485进行1:N的Modbus通信。X2RS485+RS485-GNDRS485+RS485-RS485+RS485-GND上位控制器伺服驱动器RS485接口ADM485同等品65187伺服驱动器伺服驱动器X2RS485+RS485-GNDRS485+RS485-87X2RS485+RS485-GNDRS485+RS485-ADM485同等品6565ADM485同等品8711No.SX-ZSV00015-6-R2.1松下电器产业株式会社马达经营单位MotorBusinessUnit,PanasonicCorporation2-1-2通信规格协议MODBUS-RTU(***二进制模式)物理层RS232 珠海松下伺服电机烧坏原因
深圳市日弘忠信实业有限责任公司是一家贸易型类企业,积极探索行业发展,努力实现产品创新。公司是一家私营股份有限公司企业,以诚信务实的创业精神、专业的管理团队、踏实的职工队伍,努力为广大用户提供***的产品。公司始终坚持客户需求优先的原则,致力于提供高质量的松下伺服电机,松下传感器及PLC,精密行星减速机,伙伴气动元件。深圳日弘忠信将以真诚的服务、创新的理念、***的产品,为彼此赢得全新的未来!