- 品牌
- 佳控科技
- 型号
- --
- 类型
- 齿轮-蜗杆减速器,蜗杆减速器,摆线减速器,摆线针轮减速器,行星齿轮减速器,圆柱齿轮减速器,无级减速器,谐波减速器
- 载荷状态
- 均匀载荷,强冲击载荷
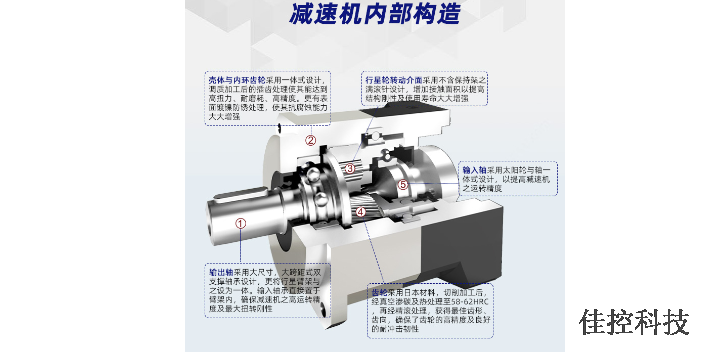
联轴器同轴的过盈配合当轴断裂部位正好是联轴器同轴过盈配合的边缘处,过盈配合对轴的强度影响很大。可见:过盈配合H7/r6的应力集中系数可达2.2以上;过盈配合H7/k6的应力集中系数约为1.77;高速轴常用的过盈配合H7/m6的应力集中系数不会小于1.8。因此,高速轴就容易在联轴器与轴过盈配合边缘处断裂了。过盈连接的应力集中和接触应力分布实例如图7所示。值得注意的是,以上原因之一(键槽应力集中)和原因之二(过盈连接应力集中)虽然对高速轴的强度有影响,但是两者在轴的强度设计和安全系数计算中都已经涉及的因素,因此可以肯定,两者都不是造成轴容易断裂的决定性原因。减速机的种类繁多,包括齿轮减速机、行星减速机、蜗轮蜗杆减速机等。崇明区硬齿面减速机供应商
在当今工业4.0的时代,高效、稳定的传动系统成为了不可或缺的和心。佳控科技(杭州)有限公司凭借其行星减速机技术,正为全球工业领域带来前所未有的变革。行星减速机以其紧凑的结构、高效率和长寿命,在自动化设备、机器人、数控机床等领域得到了广泛应用。佳控科技的产品不仅性能好,而且能够根据不同需求进行定制,满足客户的多样化需求。在精密制造领域,每一个细节都至关重要。佳控科技的行星减速机以其高精度、低噪音和低振动等特性,为设备提供了稳定可靠的动力输出。无论是在医疗器械、光学设备还是精密测量仪器中,佳控科技的产品都以出色的表现赢得了用户的信赖。浦东新区精密型减速机大概多少钱减速机的工作原理基于齿轮的啮合,实现动力的传输和速度的降低。
精密减速机作为机器人**零部件,占据了机器人整机约35%的成本。同时,减速机在工业机器人的**零部件中技术壁垒极高,间隙或过盈配合的微小偏差都会导致接触刚度和啮合刚度的成倍差异,进而影响工业机器人运动参数的极大变化。对于机器人关节用高精密减速机,日本具备*****优势,目前世界机器人市场约75%的精密减速机被日本企业垄断,是中国工业机器人行业亟待解决的“卡脖子”难题。与此同时,机器人行业日益增长的需求,也使得**精密减速机“卡脖子”难题变得更加迫在眉睫。
步进电机减速机错位即是失步,失步分为丢步和越步。步进电动机正常工作时,每接收一个控制脉冲就移动一个步距角,即前进一步。若连续地输入控制脉冲,电动机就相应地连续转动。丢步时,转子前进的步数小于脉冲数;越步时,转子前进的步数多于脉冲数。一次丢步和越步的步距数等于运行拍数的整数倍。丢步严重时,将使转子停留在一个位置上或围绕一个位置振动,越步严重时,拖动结构将发生过冲。减速步进电机与普通减速电机相比较,减速步进电机可以实现速度和位置的控制,普通减速电机则无法实现定位控制。减速机的选择应根据工作负载、转速要求、空间限制等因素进行综合考虑。
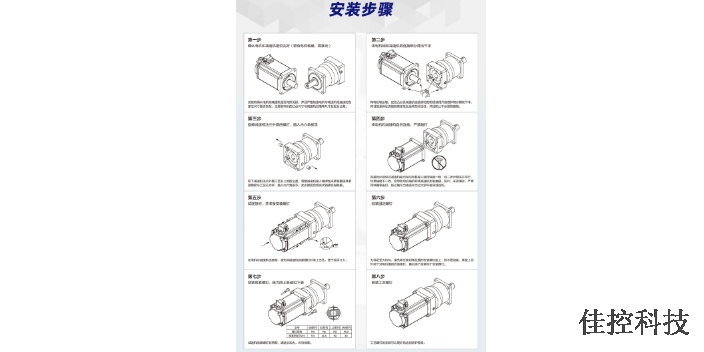
按规定的油量加足清洁的润滑油,在额定的转速下进行正、反向空载试运行。试运行时间应当在半小时间以上,并应符合下列要求:1、各联结件、紧固件不得有松动现象。2、各密封处、接合处不得有漏油、渗油现象。3、减速机运转应平衡正常,不得有冲击、振动以及异常的噪音。4、油泵工作正常,油路畅通无阻。减速机空载试运行合格后,应当对其进行负载试运行。负载在试验应在额定的转速下,分别按减速机额定栽荷的25%、50%、75%、100%分四个阶段慢慢加载。而每个阶段运行的时间以润滑油温升稳定为准,并连续运转3h后油温不超过100℃若减速箱本身有冷却系统的,油温应不超过90℃。减速机的种类繁多,可以根据不同的工作需求选择合适的型号和规格。崇明区硬齿面减速机供应商
对减速机的寿命而言,扭力计算非常重要,并且要注意加速度的最大转矩值,是否超过减速机之最大负载扭力。崇明区硬齿面减速机供应商
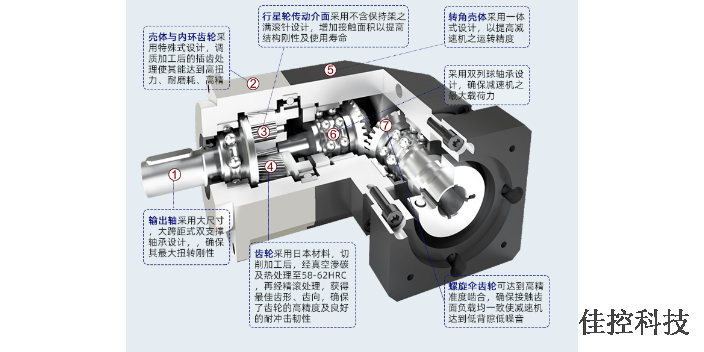
对于减速机的选择,除了上述的参数选择,还要对减速机的类型和安装方式进行选择,例如你选择的减速机是行星减速机,还是蜗轮蜗杆减速机,是同轴直联式,还是90度垂直安装等等。特别是对于蜗轮蜗杆减速机的选择,有其特定的应用场景,例如要求整个运动机构具备自锁功能,我们很多时候都有这样的设计需求,例如传动机构是垂直安装的时候,为了避免机构在电机断电后下坠,通常我们选择蜗轮蜗杆式的减速机。当然很多人会抬杠说可以选择带抱闸的伺服电机,其实理论上是可以的,而且通常垂直方向的伺服电机我们都会选择抱闸电机,但是我们在实际的应用中会发现,伺服电机在通电的瞬间很多机构会出现微量下坠的现象,如果这个时候你选择的是蜗轮蜗杆的减速机,那就可以很好的避免这样的现象,因为蜗轮蜗杆的减速机是带自锁功能的。当然这个自锁是有前提的,传动比要大于一定的比值,蜗轮蜗杆的减速机才能真正起到自锁的作用,减速比太小依然是不可靠的,具体的比值我忘记了(好像是要超过30,不确定),在使用的时候可以和减速机厂家好好的沟通一下,他们有相关参数的。所以选择什么样的型号的安装方式也很重要,并不是随心所欲的去做选择的。崇明区硬齿面减速机供应商
- 松江区硬齿面减速机现价 2024-11-07
- 松江区减速机产品介绍 2024-11-07
- 齿轮减速机产品介绍 2024-11-07
- 奉贤区K系列螺旋锥齿轮减速机大概多少钱 2024-11-07
- 江苏减速机大概多少钱 2024-11-07
- 奉贤区专业减速机品牌 2024-11-07
- 天津回转减速机 2024-11-07
- 普陀区涡轮蜗杆减速机排行榜 2024-11-04
- 浙江精密减速机现价 2024-10-30
- 浦东新区专业减速机排行榜 2024-10-30
- 宝山区涡轮蜗杆减速机哪里好 2024-10-30
- 虹口区现代化减速机大概多少钱 2024-10-25