全地形履带式机器人的功能扩展性体现在多任务模块化设计上,其标准接口可快速更换机械臂、探测传感器或载货平台等执行机构。在灾害救援场景中,搭载六自由度液压机械臂的机器人能精确抓取50公斤重的混凝土块,配合力反馈传感器实现柔性操作,避免对被困人员造成二次伤害。环境监测模块集成温湿度、气体成分与放射性检测仪...
履带式基本参数
- 品牌
- 宇卫创海
- 型号
- 齐全
履带式企业商机
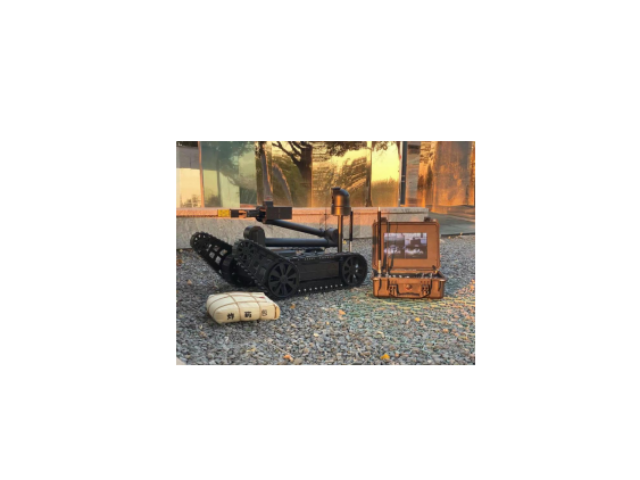
履带式救援机器人的作业功能体系呈现明显的模块化与协同化特征。其机械臂采用六自由度设计,末端执行器可快速更换破拆钳、液压剪、生命探测仪等12种工具,较大负载达50kg,在混凝土墙破拆测试中,能在15分钟内完成直径30cm的规则孔洞制作。针对化学泄漏等次生灾害,机器人配备的正压防爆舱体可耐受-20℃至60℃的极端温度,集成式气体检测模块能同时监测VOCs、CO、H2S等8类有毒气体,浓度阈值报警精度达ppm级。在通信方面,采用自组网中继技术,可在无公网环境下建立半径500米的星型网络,支持4K视频流与控制指令的同步传输。更值得关注的是其人机协作功能,通过力反馈手柄与AR眼镜,操作人员可获得触觉与视觉的双重感知,实现机械臂的毫米级精确操控。这种设计使机器人既能单独完成搜救、运输等基础任务,又可在高危区域替代救援人员执行排爆、危化品转移等高风险作业,形成机器探路-人员决策-人机协同的新型救援模式。沙漠地区,履带式物资运输机器人克服沙地运送物资。上海全地形履带式机器人供货公司

导航系统采用激光SLAM与视觉惯性里程计融合的定位方案,通过360°旋转激光雷达构建厘米级精度的三维环境地图,同时利用双目立体视觉系统识别地形特征点。在复杂场景中,系统通过卡尔曼滤波算法融合IMU、GPS与编码器数据,将定位误差控制在±5cm范围内。路径规划模块基于A*算法与动态窗口法,可实时计算好的行进路线,并通过模糊PID控制器调整两侧履带转速差,实现0.1°/s的转向精度。特别设计的心理战任务模块集成多模态交互系统,包括可变焦距高清摄像机、定向声波发射器与全息投影装置。当机器人接近目标区域时,系统通过激光雷达识别人员分布,自动调整行进路线至有效传播范围,同时启动心理战装备:声波发射器可定向投射频率18-22kHz的次声波干扰,全息投影装置能生成3D虚拟影像,配合预先录制的心理战音频实现多维度信息渗透。这种将环境感知、自主导航与心理战装备深度集成的系统架构,使机器人能在无人干预情况下完成24小时持续作战任务。长沙中型全地形履带式心战机器人履带式机器人的离地间隙合适,保障物资运输机器人在起伏路段正常运输。

宇卫创海智能装备(苏州)有限公司的自动导航大型全地形履带式心战机器人是未来战场上的一种创新心理战装备。这种机器人结合了先进的导航技术和强大的全地形适应能力,能够在各种复杂环境中执行心理战任务。其设计灵感来源于现代纷争对信息战和心理战的高度重视,通过搭载先进的通讯设备和宣传系统,能够向敌方传递定制化的信息,瓦解其战斗意志。此外,这种机器人还具备高度智能化的特点,能够根据战场态势自动调整策略,确保心理战效果的较大化。它的履带式设计不仅赋予了它出色的越野能力,还能在极端天气和复杂地形中保持稳定,确保任务的连续性和有效性。未来战场上,自动导航大型全地形履带式心战机器人将成为信息作战的重要力量,为赢得纷争胜利提供有力支持。
在动态避障场景中,PSD传感器实时检测5m内障碍物距离,当检测到突发障碍时,控制系统立即调整双侧履带速差,例如将左侧速度从1.5m/s降至0.8m/s,右侧保持1.2m/s,使机器人以0.7m半径完成紧急避让。这种分层控制架构在东南大学的野外实验中表现出色,其3D定位误差控制在±5cm以内,环境建模效率较传统方法提升40%。针对履带滑动转向的固有缺陷,研究人员开发了动力学补偿算法,通过实时监测电机电流变化推算履带与地面的摩擦系数,进而动态调整输出扭矩,使机器人在湿滑路面上的轨迹跟踪误差从0.3m降至0.1m以内,明显提升了复杂环境下的运动可靠性。履带式机器人在多种复杂路况切换自如,助力物资运输机器人顺利运输。

自动导航大型全地形履带式心战机器人作为特种作业领域的创新装备,其重要功能聚焦于复杂环境下的心理威慑与战术支援。依托强度高履带底盘与差速驱动系统,该机器人可实现30度坡道攀爬、200mm垂直越障及原地180度转向,在松软沙地、泥泞沼泽、碎石坡道等极端地形中保持稳定行驶。其搭载的多传感器融合系统整合了16线激光雷达、毫米波雷达、全景相机及惯性测量单元,通过SLAM算法实时构建三维环境地图,结合差分GPS实现厘米级定位精度。在执行心理战任务时,机器人可通过机械臂搭载的全息投影装置播放定制化心理战影像,配合360度环绕音响系统播放定向声波,形成覆盖半径50米的心理威慑场域。例如,在山地反恐行动中,机器人可利用地形掩护接近目标区域,通过人脸识别摄像头锁定目标后,自动切换至心理战模式,播放预先录制的劝降语音及虚拟战场画面,有效瓦解敌方士气。其模块化设计支持快速更换任务载荷,既可搭载心理战设备,也可替换为破拆工具或生命探测仪,实现多场景任务切换。履带式机器人的防滑性强,在湿滑地面上物资运输机器人运输不滑跤。潍坊小型履带式心战机器人
履带式机器人在有植被区域可行走,物资运输机器人在其中运输无阻碍。上海全地形履带式机器人供货公司
小型履带式心战机器人的工作原理深度融合了机械传动、环境感知与智能决策技术,其重要在于通过履带式底盘实现复杂地形的稳定移动,并依托多传感器系统完成战场心理战信息的精确采集与动态干预。履带行走机构采用四轮一带结构,即驱动轮、支重轮、导向轮、拖带轮与强度高橡胶履带协同工作,驱动轮通过永磁直流电机直接驱动,电机转速经行星减速器降速增扭后传递至履带,确保机器人能在沙地、碎石坡、泥泞等非结构化地形中保持低打滑率与高通过性。上海全地形履带式机器人供货公司
与履带式相关的文章
苏州中型全地形履带式心战机器人生产厂家
- 江苏自动导航中型全地形履带式心战机器人供货报价 2025-09-27
- 履带式心战机器人生产商 2025-09-27
- 上海履带式物资运输机器人供货商 2025-09-27
- 自动导航大型全地形履带式心战机器人现价 2025-09-27
- 武汉中型全地形履带式心战机器人 2025-09-27
- 苏州履带式机器人经销商 2025-09-26
- 履带式心战机器人生产 2025-09-26
- 苏州全地形履带式机器人价格 2025-09-26
- 上海全地形履带式机器人供货公司 2025-09-26
- 江苏履带式心战机器人生产商 2025-09-25
- 上海大型全地形履带式心战机器人生产 2025-09-04
- 履带式物资运输机器人厂家 2025-09-04

与履带式相关的新闻
-
履带式救援机器人哪里买 2025-09-03 04:08:19全地形轮式运输机器人在当今社会的应用范围极为普遍,它们以其优异的机动性和适应性,在各种复杂环境中发挥着不可替代的作用。全地形轮式运输机器人能够深入战场前线,执行物资运输、伤员转运等危险任务,有效减少了人员伤亡风险。它们不仅能在平坦的路面上高速行进,还能轻松跨越崎岖山地、沙漠、沼泽等极端地形,确保任务...
-
上海履带式巡防侦察机器人生产 2025-09-03 07:04:22宇卫创海智能装备(苏州)有限公司的履带式物资运输机器人在现代工业和物流领域发挥着举足轻重的作用。它们凭借其强大的越野能力和高负载性能,在复杂多变的地形环境中游刃有余。无论是崎岖的山地、泥泞的湿地,还是建筑工地上的碎石路面,履带式机器人都能稳定前行,确保物资运输的连续性和高效性。这种机器人还配备了先进...
-
上海履带式救援机器人生产厂家 2025-09-03 06:05:20宇卫创海智能装备(苏州)有限公司的全地形履带式机器人在执行特定任务时,还能根据需求搭载不同的功能模块,如机械臂进行物品抓取与操作、环境监测设备进行空气质量或土壤湿度检测,或是配备高清摄像头与热成像仪进行远程监控与侦察。这种模块化设计极大地拓宽了机器人的应用范围,使其能够灵活应对各种挑战。在农业领域,...
-
兰州中型全地形履带式心战机器人 2025-09-03 03:04:35宇卫创海智能装备(苏州)有限公司小编介绍,随着技术的不断进步,特情救援机器人的应用范围还在不断拓展。在矿山救援中,它们能够深入地下,克服复杂地形,精确定位被困人员,提供生命支持。在海洋救援中,特情救援机器人则能够长时间在水下作业,搜寻失踪人员,回收贵重物品。此外,它们还被应用于极地探险、森林防火等领...
与履带式相关的问题
新闻资讯
产品推荐
-

江苏履带式排爆机器人研发
2025-12-29 -

山西负重10KG中型单摆臂履带排爆机器人
2025-12-28 -

嘉兴中大型单摆臂履带排爆机器人
2025-12-28 -

智能中型排爆机器人生产
2025-12-28 -

长沙小型排爆机器人
2025-12-28 -

江苏负重10KG中型单摆臂履带排爆机器人供货报价
2025-12-28 -
苏州负重20KG中大型单摆臂履带排爆机器人生产厂家
2025-12-28 -
苏州负重5KG小型履带排爆机器人现货
2025-12-27 -

全地形轮式运输机器人供货公司
2025-12-27