- 品牌
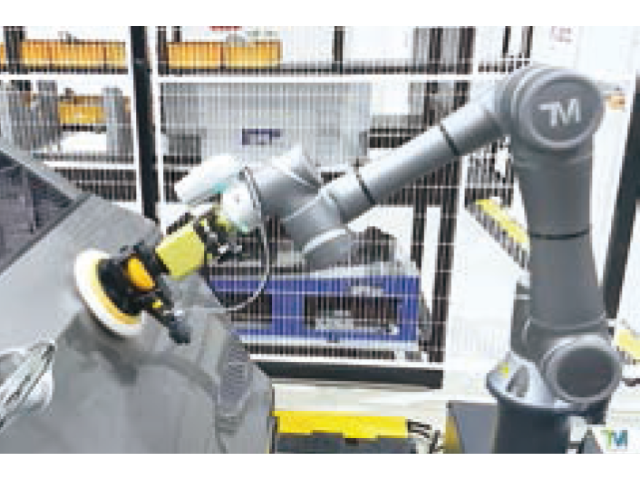
- 协作机器人,达明机器人
- 服务项目
- 齐全
选择协作机器人系统集成的网络架构时,需要考虑以下几个关键因素:1.系统需求:首先要明确系统的功能需求,包括协作机器人之间的通信方式、数据传输量、实时性要求等。2.网络拓扑:根据系统规模和布局,选择合适的网络拓扑结构,如总线型、星型、树型或网状结构。3.带宽和延迟:根据系统对带宽和延迟的需求,选择适当的网络技术,如以太网、无线网络或工业以太网。4.安全性:考虑系统的安全需求,选择支持加密和身份验证的网络架构,确保数据传输的安全性。5.可扩展性:选择具有良好扩展性的网络架构,以便系统能够灵活地扩展和升级。综合考虑以上因素,可以选择适合系统需求的网络架构,确保协作机器人系统的高效运行和稳定性。协作机器人系统集成,可以实现生产现场的数字化和智能化管理,提高企业管理水平。四川协作机器人系统集成调试测试

协作机器人系统集成中的故障诊断和修复是一个复杂的过程,需要综合考虑硬件、软件和通信等多个方面。首先,对于硬件故障,可以通过检查传感器、执行器、电路板等组件来识别问题,并进行必要的维修或更换。其次,针对软件故障,需要对控制算法、编程逻辑等进行仔细排查,可能需要更新或修复软件代码。此外,通信故障可能导致机器人之间或机器人与其他设备之间的协作问题,需要检查网络连接、通信协议等方面的设置。在进行故障诊断时,可以利用诊断工具、日志记录和远程监控等技术手段来辅助。修复故障时,需要根据具体情况采取相应的措施,可能包括重启系统、调整参数、修复软件等。除此之外,为了提高故障诊断和修复的效率,建议建立完善的故障诊断流程和记录系统,以便未来参考和改进。四川协作机器人系统集成调试测试在未来,协作机器人系统集成将会更加普及化,成为生产中不可或缺的一部分。
要将协作机器人与现有的自动化系统集成,首先需要确保协作机器人具有与现有系统兼容的接口和通信协议。其次,需要编写适当的软件代码或脚本,以确保协作机器人能够与现有系统进行数据交换和指令传递。另外,可能需要进行一些硬件调整或安装额外的传感器设备,以确保协作机器人能够与现有系统无缝配合。在集成过程中,需要进行充分的测试和调试,以确保协作机器人与现有系统的稳定性和可靠性。除此之外,培训相关人员,使其了解如何操作和维护集成后的系统,以确保整个系统能够顺利运行并发挥更大效益。
协作机器人系统集成对人员技能要求涵盖多个方面,主要包括以下几点:1.技术能力:人员需要具备相关的技术背景和技能,包括机器人技术、自动化控制、传感器技术等方面的知识,以便能够理解和操作协作机器人系统。2.编程能力:人员需要具备一定的编程能力,能够编写、调试和优化协作机器人系统的控制程序,实现系统的自动化运行和协作。3.沟通能力:协作机器人系统通常需要与其他系统或设备进行交互和协作,人员需要具备良好的沟通能力,能够与团队成员、客户或供应商进行有效的沟通和协调。4.问题解决能力:在协作机器人系统集成过程中可能会遇到各种技术和操作问题,人员需要具备良好的问题解决能力,能够快速准确地定位问题并提出解决方案。5.学习能力:由于技术不断更新和发展,人员需要具备持续学习的能力,不断跟进全新的技术发展动态,保持自身的竞争力和适应能力。通过集成,机器人可以实现自动化的故障诊断和修复。

协作机器人系统集成涉及多个技术标准,其中一些关键的标准包括:1.ROS(机器人操作系统):ROS是一个开源的机器人操作系统,提供了一套用于构建机器人应用程序的标准框架和工具。2.OPC UA(统一架构):OPC UA是一种用于工业自动化领域的通信协议,用于实现不同设备和系统之间的互操作性。3.MQTT(消息队列遥测传输):MQTT是一种轻量级的消息传输协议,适用于物联网和传感器网络,可用于协作机器人系统中的数据传输和通信。4.5G通信标准:5G技术提供了高速、低延迟的通信能力,对于协作机器人系统中的实时数据传输和远程控制至关重要。5.IEEE 802.11标准:用于Wi-Fi网络的通信标准,可用于协作机器人系统中的局域网通信。协作机器人系统集成可以提高生产线的整体效率和质量。成都装配协作机器人系统集成供应商
协作机器人系统集成是未来智能化发展的重要趋势,将为企业带来更广阔的发展空间和机遇。四川协作机器人系统集成调试测试
在协作机器人系统集成中,实现与现有系统的集成和兼容通常需要以下步骤:1.确定需求:首先需要明确现有系统的功能和数据需求,以及协作机器人系统的功能和接口要求。2.接口设计:设计协作机器人系统与现有系统之间的接口,确保二者可以进行数据交换和通信。3.数据转换:如果现有系统和协作机器人系统的数据格式不兼容,需要进行数据转换,确保数据能够正确传递和解释。4.测试和验证:在集成过程中,需要进行充分的测试和验证,确保协作机器人系统与现有系统的集成能够正常运行并达到预期效果。5.持续优化:集成完成后,需要进行持续的优化和改进,以确保协作机器人系统与现有系统的兼容性和稳定性。通过以上步骤,可以有效实现协作机器人系统与现有系统的集成和兼容,提高系统的整体效率和功能性。四川协作机器人系统集成调试测试

在协作机器人系统集成中,确保系统的稳定性和可靠性是至关重要的。首先,需要进行全方面的系统设计和规划,确保各个组件之间的协调和兼容性。其次,进行严格的软硬件测试和验证,包括功能测试、性能测试、安全测试等,以确保系统在各种情况下都能正常运行。同时,采用可靠的通信协议和数据传输方式,确保信息传递的准确性和及时性。另外,建立完善的故障检测和容错机制,及时发现和处理问题,保障系统的稳定性。此外,定期进行系统维护和更新,保持系统的全新状态,提高系统的可靠性和安全性。除此之外,培训操作人员,提高其对系统的使用和维护能力,从而确保系统长期稳定可靠地运行。协作机器人系统集成可以提升生产线的灵活性和适应性,更好地...
- 长沙智能协作机器人系统集成费用 2024-06-25
- 广东专业协作机器人系统集成 2024-06-25
- 广州装配协作机器人系统集成工作站 2024-06-21
- 江苏精密协作机器人系统集成公司 2024-06-21
- 上海工业协作机器人系统集成工作站 2024-06-20
- 浙江焊接协作机器人系统集成哪家好 2024-06-20
- 深圳智能协作机器人系统集成解决方案 2024-06-17
- 重庆协作机器人系统集成厂家 2024-06-13
- 深圳全自动协作机器人系统集成供应商 2024-06-13
- 重庆全自动协作机器人系统集成报价 2024-06-11


- 四川协作机器人系统集成调试测试 2024-06-06
- 南京全自动协作机器人系统集成应用技术 2024-06-06
- 上海自动化协作机器人系统集成解决方案 2024-06-04
- 浙江焊接协作机器人系统集成应用技术 2024-05-28
- 江苏全自动协作机器人系统集成哪家好 2024-05-27
- 南京全自动协作机器人系统集成调试测试 2024-05-27




- 浙江机电设备安装调试公司 06-25
- 浙江驱动系统设备安装调试应用技术 06-24
- 湖北设备安装调试厂家 06-24
- 湖南控制系统设备安装调试应用技术 06-24
- 江苏锂电设备安装调试价格 06-21
- 广州装配协作机器人系统集成工作站 06-21
- 江苏精密协作机器人系统集成公司 06-21
- 重庆锂电设备安装调试方案设计 06-20
- 上海工业协作机器人系统集成工作站 06-20
- 浙江焊接协作机器人系统集成哪家好 06-20