 首页 > 新闻中心
首页 > 新闻中心
首页 > 新闻中心

机器人焊钳的移动速度和焊接速度可以调整,这是因为机器人焊钳的控制系统可以通过编程来控制其运动和焊接速度。在焊接过程中,机器人焊钳需要根据焊接工艺要求和焊接材料的特性来调整其移动速度和焊接速度,以确保焊接质量和效率。移动速度是指机器人焊钳在焊接过程中移动的速度,它的调整可以影响焊接速度和焊接质量。如果...

逆变焊机是一种高压电设备,使用时需要注意安全防护措施,以避免电击、火灾等危险事件的发生。以下是逆变焊机的安全防护措施:1.确保逆变焊机的接地良好,避免漏电和电击。2.在使用逆变焊机时,应穿戴绝缘鞋、手套、眼镜等防护用品,以保护自身安全。3.在使用逆变焊机时,应避免在潮湿的环境下操作,以避免漏电和电击...

逆变焊割设备由逆变电源与外接设备组成。其中逆变电源是逆变焊割设备的中心,其工作过程为:工频交流-直流-高频交流-变压-直流,是将三相或单相50Hz工频交流电整流、滤波后得到一个较平滑的直流电,由IGBT或场效应管组成的逆变电路将该直流电变为15~100kHz 的交流电,经中频主变压器降压后,再次整流...
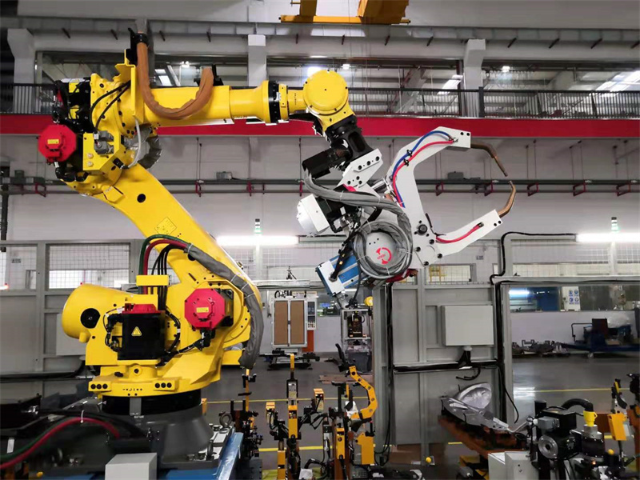
机器人焊钳在灵活性方面表现出色。首先,机器人焊钳可以根据不同的焊接任务进行编程和调整,以适应不同的工件形状和大小。其次,机器人焊钳可以在不同的角度和位置进行焊接,从而实现更加复杂的焊接任务。此外,机器人焊钳还可以根据需要进行自动化控制,从而提高生产效率和质量。除此之外,机器人焊钳还可以与其他机器人和...
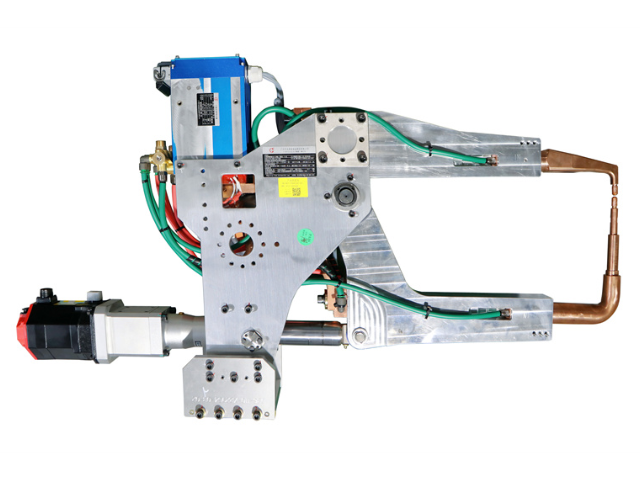
机器人焊钳在焊接过程中保持稳定需要考虑以下几个方面:1.机器人的运动控制:机器人需要具备精确的运动控制能力,以确保焊钳在焊接过程中的稳定性。机器人的运动控制系统需要具备高精度的位置控制和速度控制能力,以确保焊钳在焊接过程中的稳定性。2.焊钳的结构设计:焊钳的结构设计需要考虑到焊接工件的形状和大小,以...

使用储能焊机时,选择合适的焊接参数是非常重要的。首先,需要根据焊接材料的种类和厚度来确定焊接电流和电压。一般来说,焊接电流应该适中,不宜过大或过小,以免引起过热或焊接不牢固。同时,焊接电压也需要根据焊接材料的厚度和电流来调整,以确保焊接质量。其次,需要根据焊接方式来选择合适的焊接参数。例如,对于手工...

逆变焊机是一种高频率交流电源,主要由以下几个部分组成:1.整流器:将交流电源转换为直流电源,通常采用桥式整流电路。2.滤波器:用于滤除直流电源中的脉动,通常采用电容器和电感器组成的滤波电路。3.逆变器:将直流电源转换为高频交流电源,通常采用MOSFET或IGBT等功率半导体器件。4.控制电路:用于控...

选择合适的储能焊机需要考虑以下几个方面:1.焊接材料:不同的焊接材料需要不同的焊接电流和电压,因此需要选择适合焊接材料的储能焊机。2.焊接厚度:焊接厚度越大,需要的焊接电流和电压就越高,因此需要选择能够满足焊接厚度要求的储能焊机。3.焊接位置:不同的焊接位置需要不同的焊接电流和电压,因此需要选择适合...

逆变焊机是一种高压电设备,使用时需要注意安全防护措施,以避免电击、火灾等危险事件的发生。以下是逆变焊机的安全防护措施:1.确保逆变焊机的接地良好,避免漏电和电击。2.在使用逆变焊机时,应穿戴绝缘鞋、手套、眼镜等防护用品,以保护自身安全。3.在使用逆变焊机时,应避免在潮湿的环境下操作,以避免漏电和电击...
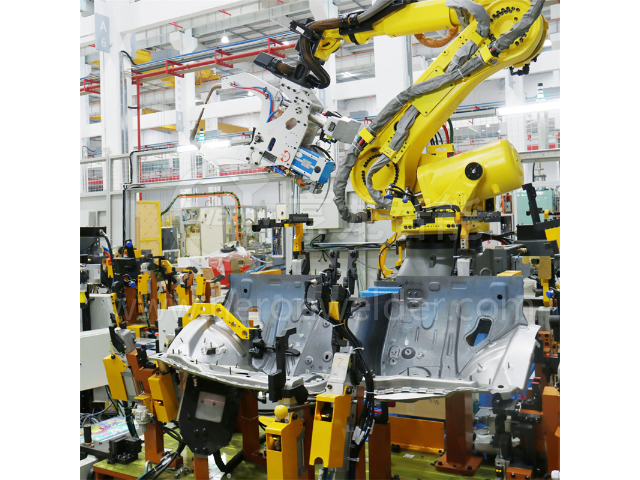
机器人焊钳的操作原理是通过程序控制机器人的动作,将焊钳移动到需要焊接的位置,然后进行焊接操作。机器人焊钳通常由机器人手臂、焊钳、焊接电源、控制系统等组成。首先,机器人手臂会根据程序指令移动到需要焊接的位置,然后焊钳会夹住需要焊接的工件。接着,焊接电源会提供所需的电流和电压,将焊接材料加热至熔化状态,...

作为一款高级焊接设备,逆变焊机在操作上相对于传统的焊接设备来说,确实需要一定的技巧和经验。但是,随着技术的不断发展和普及,现在的逆变焊机已经越来越智能化,操作也变得越来越简单易懂。首先,逆变焊机的控制面板通常都是数字化的,可以直观地显示出焊接电流、电压、焊接时间等参数,操作者只需要根据需要进行相应的...

机器人焊钳是工业生产中常用的自动化设备,但在使用过程中也会出现故障。常见的机器人焊钳故障包括:焊接不牢、焊接位置偏移、焊接质量不佳等。以下是机器人焊钳的故障排除方法:1.检查焊接参数:焊接参数设置不当是导致焊接质量不佳的主要原因之一。检查焊接参数是否符合要求,如电流、电压、焊接速度等。2.检查焊接材...