随着科技的不断进步,无人船艇的发展前景广阔。未来无人船艇将具有更高的自主性、智能性和适应性。以下是对未来无人船艇发展趋势和应用前景的展望:提高自主性:未来的无人船艇将具有较强的自主决策能力,能够在复杂的环境中完成任务。
这将需要对现有的自动控制技术和传感器系统进行持续优化和升级。增强智能性:未来的无人船艇将具有较强的学习能力,能够通过大数据分析和深度学习等技术进行自我优化和改进。这将有助于提高无人船艇的适应性和工作效率。
拓展应用领域:未来的无人船艇将具有更广泛的应用领域,如海洋资源调查、海洋污染监测与治理、海上救援、侦察等。此外,随着物联网技术的发展,无人船艇还可以作为智慧城市的重要组成部分,参与城市水域的监控和管理。 小豚无人船喷水推进器在船舶上广阔采用。福建无人船无人船艇
2018年1月,全自主无人艇HUSTER-68在松木山水库成功首航。该产品克服了“颠簸大”“通讯弱”“易掉队”等问题,实现多无人艇的协同编队,可用于多艇协同巡逻和多艇围捕任务,技术达国内先进水平。一年后,团队又实现了国内先进机艇自主协同运动起降。2020年3月,团队提交发明专利30项并顺利“毕业”,远超原定目标;7月,耿涛带领工程成员创立小豚智能,成为国内先进的无人船行业应用解决方案供应商。在产品展示区,耿涛坐上一架远程控制台,结合眼前电子显示器实时呈现的画面,便能便捷操控远在湖面上航行的无人艇。水文测量无人船艇成交价无人船艇在海洋渔业管理中发挥着不可替代的作用。

7月26日,由陕西省安康市委副书记、市领导王浩带队,安康市招商和经济合作局、汉阴县、宁陕县、安康高新区、市发展投资集团等组成的经济合作考察团参观考察小豚智能,安康市小巨人产业园开发有限公司等企业随团考察。小豚智能总经理耿涛博士、副总经理王贻辉等陪同接待。在展厅,东莞小豚智能技术有限公司(简称:小豚智能)总经理耿涛博士向考察团一行介绍了我司的发展历程、相关技术与产品情况,现场展示了我司无人船水域巡逻实景:远程操控、全自主巡航,不*做到了零人工巡逻,还降低了钓鱼、网鱼、乱倒垃圾等水域违规现象,有力提升了水域执法科技含量与水域管理形象。
小豚安防以江豚-16为平台,具有无人自主驾驶和5G远程操控驾驶两种工作模式,搭载高清摄像头,声光电特殊装备,可代替传统人工完成水面巡逻和驱离等任务,降低作业成本,提高工作效率。工作区域适用于湖面、河面等有4G/5G网络覆盖的水域,不限操作距离。
在5G远程操控驾驶模式下,本产品采用自创的辅助驾驶技术和大带宽低延时5G技术,具有操纵自如、控制灵敏、指向精细、画面清晰、无延时感等特点;在自动驾驶模式下,可通过地图设定巡逻路线,以定速巡航模式巡逻,实现在指定路线上精细跟踪、自主巡逻。
在以上两种模式下,操作人员无需培训即可快速上手。安防巡逻作业过程中,本产品将现场高清视频和音频实时传回监控中心并自动保存,作为取证执法依据,对违法活动,进一步采用声光电装备喊话、警示,达到远程取证、交流、驱离等目的。 耿涛团队获批了“广东省全自主无人艇工程技术研究中心”及“东莞市全自主无人艇重点实验室”。

2020年,团队成立产业公司东莞小豚智能技术有限公司,获得松山湖创新创业大赛(华为专场)总决赛特等奖,研发的消费级产品获“东莞杯”金奖,成立一年通过高企认证,已获青橙资本、东莞科创金融千万级天使轮投资,其无人船相关产品和技术已在教育、环保、船舶、测绘、应急等领域得到广泛应用。
工研院作为东莞市在松山湖建设的首批重大科研机构,探索形成“体制机制新型化,团队建设专职化、技术服务规模化、产业孵化链条化”等做法。2012年被《人民日报》、《焦点访谈》专访介绍了工研院在体制机制等方面探索及成效,被誉为全国新型科研机构的典型。
针对制约区域制造业发展的关键技术问题,工研院在运动控制、智能感知、无人自主技术、工业大数据、3C产业智能制造装备及大功率激光器等研发领域取得突破,相关成果获国家技术发明二等奖(东莞建市以来较早)、广东省科技进步特等奖等。 小豚智能无轴推进器适用于各种冲浪板,水下推力设备,水下辅助动力,无人船推进等场景。上海多功能无人船艇发展
船舶智能化改造全自主无人艇关键技术研究创新团队获批广东省创新团队,随后到松山湖开启创业之旅。福建无人船无人船艇
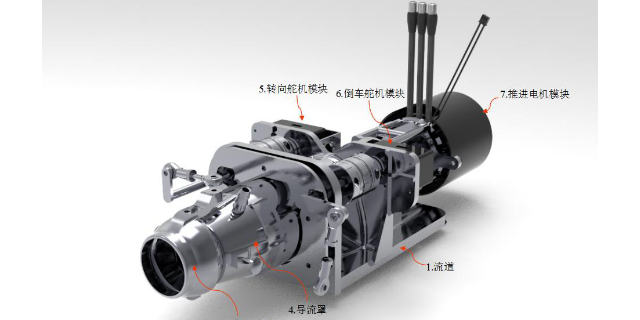
小豚动力-WJ064是一款电控一体化喷水推进器,具有全数字接口、控制角度精度高、集成度高、功率密度大等优点。小豚动力-WJ064集成了主推电机、流道、转向舵机、喷嘴等主要结构,具有控制精度高、响应快,推进效率高等优点,可提高装配船体的操纵性和通过性。
小豚动力-WJ064使用高功率密度驱动器驱动,输出功率涵盖4.5kW以下功率区间;调速过程平稳,转速控制精度可达±5%;转向采用高精度伺服控制技术,舵角控制精度可达0.1°,动态响应迅速,舵速可达60°/s;功率密度大,1.6m船体比较高航速可达10m/s。
小豚动力-WJ064采用CAN总线进行通信,比较高通信频率为100Hz,具备多套推进器同步联动技术,便于进行系统集成及二次开发 福建无人船无人船艇