一种无人船中心动力部件-无轴推进器。现有的船舶推进器,包括传统的舵桨推进、吊舱推进器、喷水推进器等大都是通过发动机带动螺旋桨叶片转动产生推力。
基于船体布置的考虑,船舶主机和螺旋桨之间需要轴系进行传动,轴系传动导致在传递过程中损耗增大,传动效率降低,轴系还会占据大量船舱空间,降低船舱利用效率。推进轴系对于水密工艺要求较高,导致结构日趋复杂,增大船舶的设计和制造难度。同时,对于某些有特定用途的水下航行器来说,轴系震动会带来大量噪声,不利于任务的执行。而小豚自研推进器恰恰解决了这些问题 小豚智能在交流会上发布了自主研制的“智能船舶辅助驾驶系统CYBERPILOT”。黑龙江警戒巡逻无人船艇怎么用
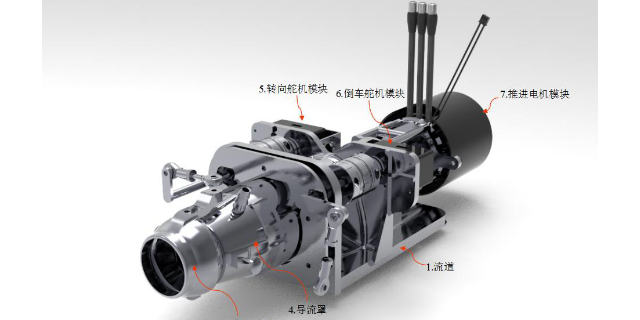
小豚动力-WJ064是一款电控一体化喷水推进器,具有全数字接口、控制角度精度高、集成度高、功率密度大等优点。小豚动力-WJ064集成了主推电机、流道、转向舵机、喷嘴等主要结构,具有控制精度高、响应快,推进效率高等优点,可提高装配船体的操纵性和通过性。
小豚动力-WJ064使用高功率密度驱动器驱动,输出功率涵盖4.5kW以下功率区间;调速过程平稳,转速控制精度可达±5%;转向采用高精度伺服控制技术,舵角控制精度可达0.1°,动态响应迅速,舵速可达60°/s;功率密度大,1.6m船体比较高航速可达10m/s。
小豚动力-WJ064采用CAN总线进行通信,比较高通信频率为100Hz,具备多套推进器同步联动技术,便于进行系统集成及二次开发 辽宁警用巡逻无人船艇工厂直销小豚智能自主研制的“智能船舶辅助驾驶系统CYBERPILOT”标配系统可服务渔船、快艇、旅游观光船等。
随着科技的不断进步和各行业对智能化设备需求的增加,无人船艇的市场前景十分广阔。在未来,水利、环保、渔业等传统行业对无人船艇的依赖度将持续提高,用于更高效的监测和管理工作。同时,新兴的海洋开发、水下考古等领域,也将为无人船艇开辟新的应用空间。随着技术的成熟和成本的降低,无人船艇将逐渐普及,进入更多的细分市场。东莞小豚智能技术有限公司凭借其在无人船艇领域的技术积累和研发实力,有望在这片广阔的市场中占据重要地位,不断拓展业务,为推动无人船艇行业的发展贡献力量。
随着无人船艇市场的快速发展,东莞小豚智能技术有限公司积极参与行业标准的制定。凭借在无人船艇研发和生产方面的丰富经验,公司与行业内其他企业、科研机构共同探讨,为无人船艇的技术规范、安全标准、质量检测等方面提供建议。通过推动行业标准的制定,有助于规范市场秩序,提高整个行业的产品质量和服务水平。小豚智能的无人船艇在技术和质量上的优势,也将成为行业标准制定的重要参考,带领无人船艇行业朝着更加健康、有序的方向发展。无人船艇的自动化水平不断提高,降低了人为错误的风险。

2020年,团队成立产业公司东莞小豚智能技术有限公司,获得松山湖创新创业大赛(华为专场)总决赛特等奖,研发的消费级产品获“东莞杯”金奖,成立一年通过高企认证,已获青橙资本、东莞科创金融千万级天使轮投资,其无人船相关产品和技术已在教育、环保、船舶、测绘、应急等领域得到广泛应用。
工研院作为东莞市在松山湖建设的首批重大科研机构,探索形成“体制机制新型化,团队建设专职化、技术服务规模化、产业孵化链条化”等做法。2012年被《人民日报》、《焦点访谈》专访介绍了工研院在体制机制等方面探索及成效,被誉为全国新型科研机构的典型。
针对制约区域制造业发展的关键技术问题,工研院在运动控制、智能感知、无人自主技术、工业大数据、3C产业智能制造装备及大功率激光器等研发领域取得突破,相关成果获国家技术发明二等奖(东莞建市以来较早)、广东省科技进步特等奖等。 小豚智能致力于研发无人船平台。福建无人船艇控制部件无人船艇价格咨询
无人船艇的轻量化设计,增强了其在复杂海域的机动性和适应性。黑龙江警戒巡逻无人船艇怎么用
无人船艇的组成结构和工作原理是实现其自主航行和任务执行的关键。以下是无人船艇的详细描述:组成结构:无人船艇通常由船体、传感器系统、自动控制系统、通信系统、动力系统等组成。其中,传感器系统用于感知周围环境,如水温、水位、流速等;自动控制系统用于控制船体的航行和任务执行;通信系统用于与岸上控制中心进行数据传输和指令接收;动力系统用于提供船只航行的动力。
工作原理:无人船艇的工作原理主要涉及航行控制和任务执行两个环节。在航行控制方面,无人船艇依靠传感器系统获取周围环境信息,通过自动控制系统进行分析和处理,生成航行指令,控制船体按照预定轨迹航行。
在任务执行方面,无人船艇可以根据任务需求配备不同的传感器和设备,如水下探测器、水质监测器、图像采集器等,通过自动控制系统执行相应的任务。 黑龙江警戒巡逻无人船艇怎么用