无人船艇在跨境水域环境监测中展现出特殊价值。针对界河、边境湖泊等敏感水域,无人艇可规避人员跨境带来的外交风险,实现无争议的环境数据采集。小豚智能研发的边境监测无人艇配备多国通信模块,能够自动切换不同制式的移动网络,确保在复杂区域的通信畅通。这些无人艇可定期采集水质样本,监测污染物跨境迁移情况,为区域环境保护合作提供客观依据。在湄公河、鸭绿江等跨境水域的应用实践表明,无人艇技术既能满足环保监测需求,又能有效避免外交纠纷,是跨境环境治理的理想工具。小豚智能是先提出“全自主无人艇”概念的团队。国内无人艇技术研究仍处于初级阶段。河北无人船艇控制部件无人船艇发展
为了保持在无人船艇领域的竞争力,东莞小豚智能技术有限公司持续加大研发投入。公司组建了一支专业的研发团队,涵盖了电子、机械、软件等多个领域的专业人才,他们致力于无人船艇的技术创新和产品优化。在研发过程中,不断引进先进的设备和技术,用于无人船艇的性能测试和功能开发。同时,积极与高校、科研机构合作,开展产学研合作项目,吸收新的科研成果,应用到无人船艇的研发中。通过大量的研发投入,无人船艇的性能不断提升,功能日益完善,为公司在市场上赢得了良好的口碑和发展机遇。山西水质监测无人船艇品牌小豚智能自主研制的“智能船舶辅助驾驶系统CYBERPILOT”,通过搭配不同的模块可构成标配和高配的系统。

多无人船艇协同作业是当前水面无人系统研发的重点方向。通过先进的集群控制算法,多艘无人艇可自主完成编队航行、区域覆盖、任务分配等复杂操作。小豚智能开发的协同控制系统,实现了无人艇间的实时通信与智能决策,在海洋测绘、水域搜救等场景展现出明显优势。例如,在执行大面积水域搜索任务时,无人艇集群可通过自主分工,将搜索效率提升数倍。这种群体智能技术的突破,不*拓展了无人艇的应用边界,也为未来智能海洋装备的发展奠定了重要基础。
无人船艇的动力系统正经历着重要的技术变革。小豚智能创新研发的混合动力系统,结合了传统燃油和新能源技术,明显提升了无人艇的续航能力。新开发的氢燃料电池动力模块,实现了零排放、低噪音的环保目标,特别适合在生态敏感水域作业。同时,智能能量管理系统可根据任务需求自动优化动力分配,比较大限度延长作业时间。这些技术创新不*解决了无人艇长期巡航的能源瓶颈问题,也顺应了绿色航运的发展趋势,为水面无人装备的可持续发展提供了新的解决方案。无人船艇搭载激光雷达,能够生成高精度三维水下地形图,助力资源勘探。

随着无人船艇应用普及,专业技术人才培养显得尤为重要。小豚智能联合多所海事院校,建立了覆盖研发、操作、维护的全链条培训体系。通过虚实结合的实训平台,学员可掌握无人艇编程控制、任务规划、故障诊断等主要技能。企业开发的模拟操作系统真实还原各种海况场景,使学员能在安全环境下积累实操经验。同时,小豚智能参与制定的无人艇操作员认证标准,为行业人才评价提供了规范依据。这套培养体系已为沿海省份输送数百名专业人才,有效缓解了行业快速发展带来的人才缺口问题,为无人船艇产业的可持续发展提供了人力资源保障。无人船艇在海上油气田巡检中,可检测平台结构安全性和周边水域环境状况。河北无人船艇控制部件无人船艇发展
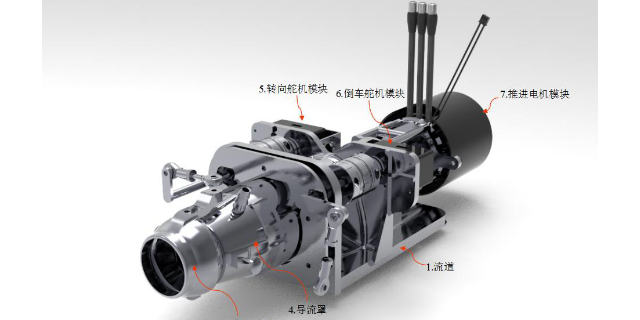
小豚智能无轴推进器适用于各种冲浪板,水下推力设备,水下辅助动力,无人船推进等场景。河北无人船艇控制部件无人船艇发展
无人船艇技术为海洋垃圾治理提供了创新性的解决方案。小豚智能研发的环保型无人艇配备智能识别系统和机械臂装置,能够自主识别并打捞水面漂浮物。通过计算机视觉算法,无人艇可准确区分海洋垃圾与海洋生物,避免误伤生态环境。在作业模式上,多艘无人艇可组成网格化清理阵列,通过协同路径规划实现大面积海域的高效清理。特别值得一提的是,这些无人艇采用太阳能供电系统,真正实现了"零碳清理"。目前该技术已在渤海湾、琼州海峡等海域开展示范应用,单艘无人艇日均清理面积可达5平方公里,为化解海洋塑料污染等环境难题提供了切实可行的技术路径。河北无人船艇控制部件无人船艇发展