从学术到技术,从技术到产品,都是有差距的。耿涛和团队在将课本上深奥、先进的理论知识应用到实际工程的过程中遇到不少困难。为了提升无人艇航线控制器精度,让其水迹呈直线走动,耿涛积极发挥党员的示范作用,带领团队通过大量的理论研究和实操,成功将先进控制理论技术应用到无人船,解决了大量的工程问题。产品从设计、装配、测试到应用,每一步都凝结了耿涛及同事们集体智慧的结晶。正是因为团队中有很多像耿涛一样的党员,在科研岗位上积极发扬着“钉钉子精神”,他们的无人自主技术部分成果已达到国际水平。他们不*开发了无轴推进器小豚-56s、无人艇平台系列江豚-12c,打造了江豚、河豚、海豚等多系列产品线和品牌,研发生产的小豚智测和小豚智教应用解决方案等系列产品在教育、环保、船舶、测绘、应急等领域得到广泛应用,真正实现了用科技“反哺”教育。其中全自主无人船多艇协同、机艇协同成果,曾被央视新闻等媒体报道。螺旋桨推进器、电动船用推进器、航空推进器、无人船喷水推进器等等,每一种都有它特殊的用途及特点。山西水下机器人无人船艇
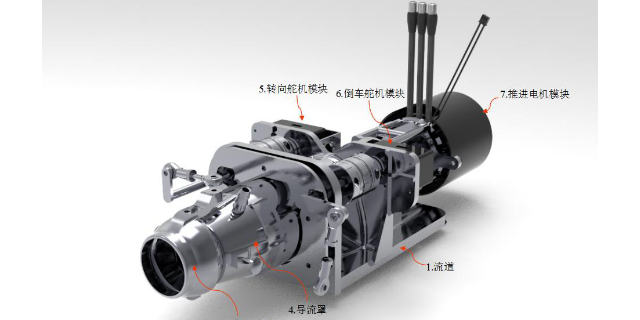
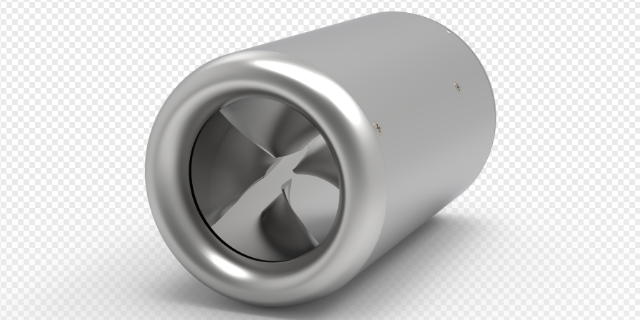
小豚自研喷泵式喷水推进器是一款电控一体化喷水推进器,具有全数字接口、控制角度精度高、集成高、功率密度大等优点。小豚动力系列产品集成了主推电机、流道、转向舵机、喷嘴等主要结构,具有控制精度高、响应快,推进效率高等优点,可提高装配船体的操纵性和通过性。小豚动力系列产品输出功率涵盖8KW以下功率区间;调速过程平稳,转速控制精度可达正负5;转向采用高精度伺服控制技术,舵角控制精度可达0.1°,动态响应迅速,舵速可达60°/s;功率密度大,3米双体船航速可达3m/s,1.6米船可达10m/s,采用CAN总线进行通信,便于进行系统集成及二次开发。小豚自研小型推进器是一款无轴高效率推进器,螺旋浆浆叶之间没有浆毂,可作为水面无人船、水下机器人、潜水助推器等产品的推进装置,欢迎各界船舶公司无人船公司等洽谈技术与合作山西水下机器人无人船艇广义上讲,推进器也包括依靠人力或风力驱动船舶前进的篙、桨、橹、纤和帆等,小豚无人船喷水推进器也是.
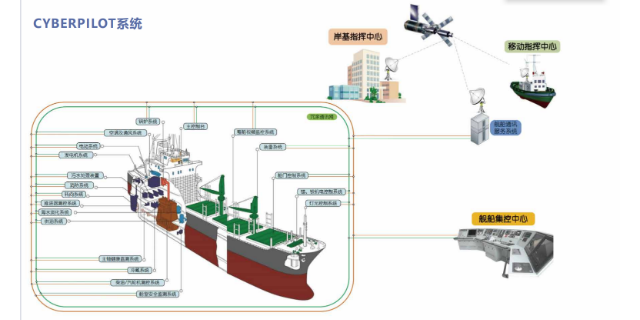
其中,平台系统各分系统定义如下:1、平台本体分系统:包括船体设计与布置、材料与结构以及平台机械,是无人船较基本的组成部分,为整个系统提供浮力、布置空间、执行机构以及必要的防护条件;2、动/能分系统:包括推进系统和电源供给系统,为无人船提供必要的水面机动能力,并为控制系统和任务载荷系统等提供电力支持;3、感知分系统:包括定位导航系统、外部环境感知系统和平台状态感知系统,为无人船运动决策与控制、自身状态监测提供必要的数据源及硬件、接口支持;4、控制分系统:包括控制系统硬件和软件,是无人船的“大脑”,通过全船的感知及控制设备,为无人船处理、分析外部空间及内部环境信息,并根据控制算法实现自主航行、自主避障等功能
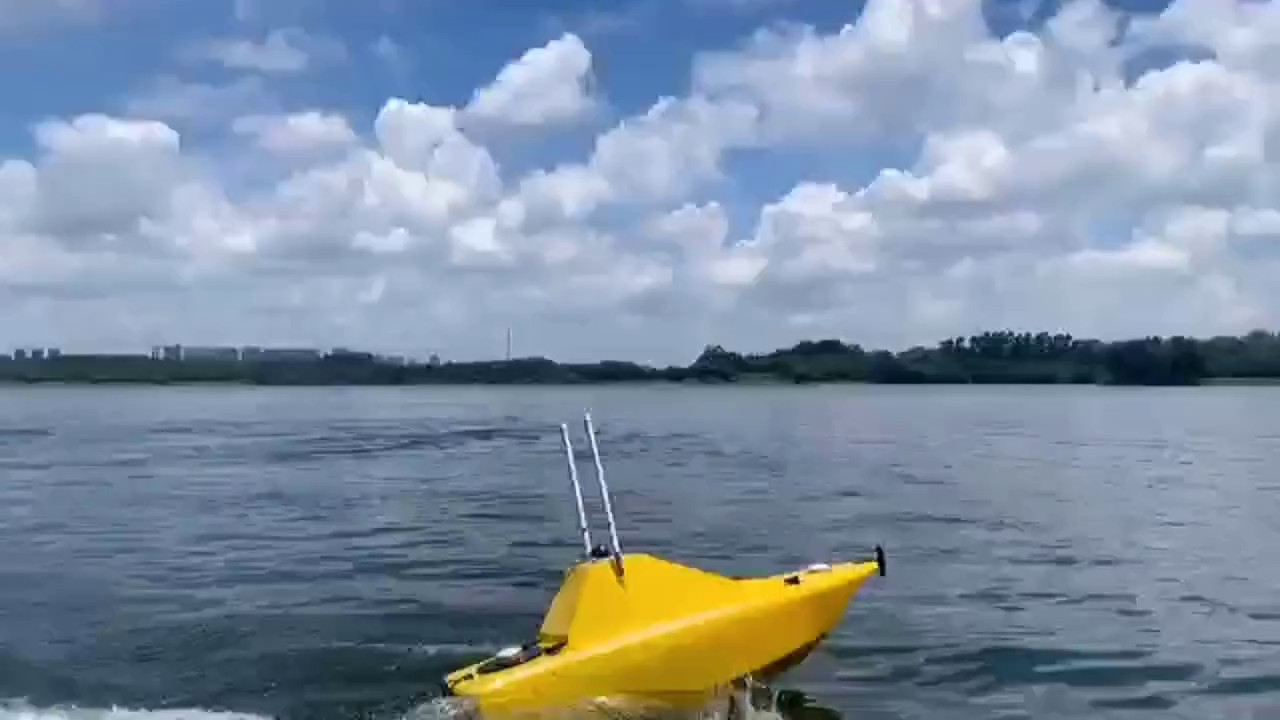
小豚安防以江豚-16为平台,具有无人自主驾驶和5G远程操控驾驶两种工作模式,搭载高清摄像头,声光电特殊装备,可代替传统人工完成水面巡逻和驱离等任务,降低作业成本,提高工作效率。工作区域适用于湖面、河面等有4G/5G网络覆盖的水域,不限操作距离。在5G远程操控驾驶模式下,本产品采用自创的辅助驾驶技术和大带宽低延时5G技术,具有操纵自如、控制灵敏、指向精细、画面清晰、无延时感等特点;在自动驾驶模式下,可通过地图设定巡逻路线,以定速巡航模式巡逻,实现在指定路线上精细跟踪、自主巡逻。在以上两种模式下,操作人员无需培训即可快速上手。安防巡逻作业过程中,本产品将现场高清视频和音频实时传回监控中心并自动保存,作为取证执法依据,对违法活动,进一步采用声光电装备喊话、警示,达到远程取证、交流、驱离等目的。公司自研警戒巡逻无人艇。
耿涛是小豚智能的总经理,也是2016年工研院引进的“广东省创新团队”——“全自主无人艇关键技术研究创新团队”重要成员之一。5年来,团队从产品研发、实验室建设到项目落地,都是在工研院完成的。截至2020年3月,团队提交发明知识产权30项并顺利“毕业”;2020年7月,耿涛带领工程重要成员,成立了小豚智能。我们是超前提出全自主无人艇概念的团队。”耿涛谈到,来到东莞以前,他曾在高校当老师,本着一颗“实业报国”的初心,才决定“下海”创业小豚动力-S90的驱动置于推进器内部,可整体浸没于水中,解决了传统推进器通讯线长、干扰大等难题。水下机器人无人船艇技术参数
无轴推进器适用于各种冲浪板,水下推力设备,水下辅助动力,无人船推进等场景。山西水下机器人无人船艇
小豚动力-WJ091是一款电控一体化喷水推进器,具有全数字接口、控制角度精度高、集成度高、功率密度大等优点。小豚动力-WJ091集成了主推电机、流道、转向舵机、喷嘴等主要结构,具有控制精度高、响应快,推进效率高等优点,可提高装配船体的操纵性和通过性。小豚动力-WJ091使用高功率密度驱动器驱动,输出功率涵盖8kW以下功率区间;调速过程平稳,转速控制精度可达±5%;转向采用高精度伺服控制技术,舵角控制精度可达0.1°,动态响应迅速,舵速可达60°/s;功率密度大,3m双体船比较高航速可达3m/s。小豚动力-WJ091采用CAN总线进行通信,比较高通信频率为100Hz,具备多套推进器同步联动技术,便于进行系统集成及二次开发山西水下机器人无人船艇
东莞小豚智能技术有限公司主要经营范围是机械及行业设备,拥有一支专业技术团队和良好的市场口碑。公司业务分为无人船控制部件,无人船控制技术,水产养殖无人船,巡逻无人船等,目前不断进行创新和服务改进,为客户提供良好的产品和服务。公司从事机械及行业设备多年,有着创新的设计、强大的技术,还有一批专业化的队伍,确保为客户提供良好的产品及服务。无人船方案提供商立足于全国市场,依托强大的研发实力,融合前沿的技术理念,及时响应客户的需求。