现有的船舶推进器,包括传统的舵桨推进、吊舱推进器、喷水推进器等大都是通过发动机带动螺旋桨叶片转动产生推力。基于船体布置的考虑,船舶主机和螺旋桨之间需要轴系进行传动,轴系传动导致在传递过程中损耗增大,传动效率降低,轴系还会占据大量船舱空间,降低船舱利用效率。推进轴系对于水密工艺要求较高,导致结构日趋复杂,增大船舶的设计和制造难度。同时,对于某些有特定用途的水下航行器来说,轴系震动会带来大量噪声,不利于任务的执行。随着人工智能、无人系统等新型行业的兴起,无人船作为一种新型的水面智能装备正逐步走入人们的视野,由于无人船在设计的时候多是有着明确的任务用途,无人船的自主航行也需要大量的感知传感器、控制计算单元,对于船舶的设计提出了更高的要求,传统的推进器受制于本身的布置局限性、噪音局限性并不能满足无人船的需求。因此,人们逐渐将目光转向无轴推进系统无人船喷水推进器一般会安装在舰船尾部,根据需要采用一个或多个喷水推进器。北京高速无人船艇工厂直销
交流会上,耿涛博士介绍了公司发展历程和技术成果,丘秉焱秘书长结合黄埔文冲公司曾经建造“大智号”智能船的情况,分析了近几年来国内研制智能船和无人船的现状与趋势,与会**高度评价小豚智能的无人船(艇)技术及其科研团队的实力,并对其无人船技术和产品的推广应用给予建议,**认为,无人船行业未来前景广阔。小豚智能前身是东莞松山湖华科城的广东华中科技大学工业技术研究院2015年引进的广东省创新科研团队--全自主无人艇关键技术研究创新团队,经过5年“孵化”,于2020年7月挂牌创立,成为国内的无人船行业应用解决方案供应商。该公司研发的无人船功能部件(小豚动力、小豚智控、小豚智讯等)、无人船平台(江豚、海豚系列,可搭载客户的设备、设施)、水下机器人部件、小豚智测和小豚智教应用解决方案系列产品、无人船行业解决方案、无人系统共性技术等产品和技术已在环保、船舶、测绘、应急、教育等领域得到广泛应用海南无人船艇控制部件无人船艇怎么样公司本着“创新,务实,开放,担当”的企业文化。

小豚自研无轴推进器S56是一款高效率,高集成度无轴推进器,高推力100N,其将传统的电机,驱动,轴系,螺旋桨集成一体,具有结构紧凑。可靠性好,推进效率高,工作噪音小等特点。具备转速闭环控制功能,CAN接口接收外部转速指令,方便用户集成使用。S56的驱动置于推进器内部,可整体浸没于水中,解决了传统推进器通讯线长,干扰大,一致性差,散热差等难题。高度集成式设计,减少了轴系传递带来的能量损耗;螺旋浆浆叶之间没有浆毂,推进器效率优于常规螺旋桨;减少了震动噪音,实现航行器静默航行,可作为水面无人船,水下机器人,潜水助推器等产品的推进装置
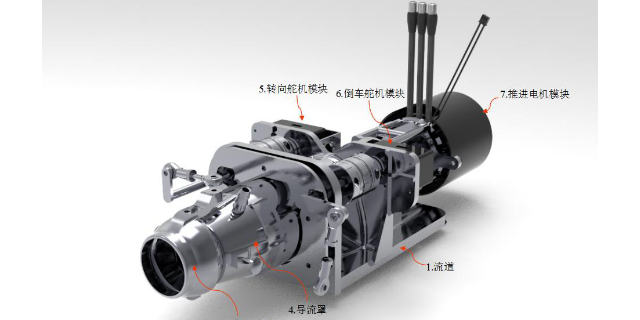
小豚动力-WJ091是一款电控一体化喷水推进器,具有全数字接口、控制角度精度高、集成度高、功率密度大等优点。小豚动力-WJ091集成了主推电机、流道、转向舵机、喷嘴等主要结构,具有控制精度高、响应快,推进效率高等优点,可提高装配船体的操纵性和通过性。小豚动力-WJ091使用高功率密度驱动器驱动,输出功率涵盖8kW以下功率区间;调速过程平稳,转速控制精度可达±5%;转向采用高精度伺服控制技术,舵角控制精度可达0.1°,动态响应迅速,舵速可达60°/s;功率密度大,3m双体船比较高航速可达3m/s。小豚动力-WJ091采用CAN总线进行通信,比较高通信频率为100Hz,具备多套推进器同步联动技术,便于进行系统集成及二次开发小豚自研无人船喷水推进器适用于游艇,无人船动力系统等场景。

喜讯丨小豚智能技术顾问团队“自主无人艇”项目获广东省技术发明奖一等奖。4月15日广东省科技创新大会在广州召开大会颁发了2021年度广东省科学技术奖其中广东华中科技大学工业技术研究院(简称“工研院”)牵头完成的自主无人艇机集群跨域协同关键技术及应用项目获2021年度广东省技术发明奖一等奖(全省5个之一)。2021年度广东省科学技术奖包括自然科学奖22项、技术发明奖12项、科技进步奖142项,合计176项。工研院牵头完成的“自主无人艇项目”获广东省技术发明奖一等奖,是全省5个技术发明一等奖获奖项目之一,也是东莞市近10年来牵头获得的广东省技术发明一等奖。水流从船体下面的入水口进入无人船喷水推进器,然后经过叶轮和导叶,压力上升在喷口水流的压能转化为动能.山西无轴推进器无人船艇怎么用
公司致力于研发和销售无人船主要部件。北京高速无人船艇工厂直销
小豚自研船舶辅助航行驾驶系统CYBERPILOT为船舶提供一个智能化的船舶交互和驾驶平台,包括执行层、控制层、规划层、感知层、人机交互系统。其中执行层负责控制方向和油门,能够与市面上主流的发动机电子底盘进行匹配,由小豚ME系列智能网关软定义路由实现;控制层由小豚MC04系列用于实现船舶的运动控制;规划层由MC11系列**部件实现,主要用于规划船舶的航线,将地图/海图和图像增强技术通过人机交互系统显示。用户可通过地图/海图界面给无人船下发航线指令实现航速、航向与航迹跟随自动舵功能、AR视觉增强辅助避障、360环视辅助靠泊等辅助驾驶功能。同时将采集到的船舶信息数据和环境信息实时展示出来。北京高速无人船艇工厂直销