序列图像的差异通常是运动目标检测和跟踪的出发点,认为目标的运动是图像差异的根本原因。但是,这是建立在背景本身不运动的前提下的。因此,在许多跟踪系统中,比如车载,由于车的振动导致传感器位置的变化,表现在图像上就是背景的运动,因此在做差图像和背景自动更新之前,都必须先经过配准,即让所有图像在都同一个坐标...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
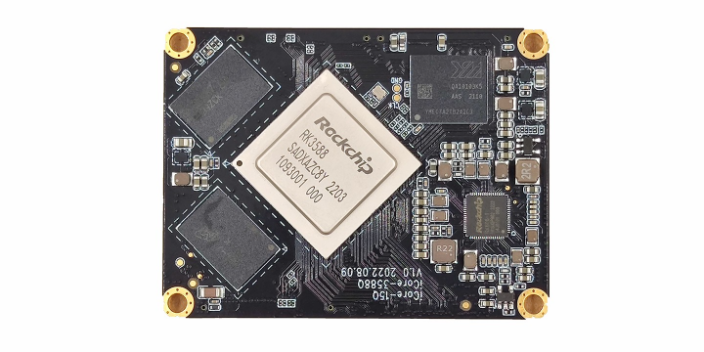
成都慧视光电技术有限公司的RV1126图像处理板采用国产高性能CPU,搭载自研目标检测及跟踪算法。半径18.5mm,厚度4mm,功耗小于6W。具有体积小、功耗低、目标检测准确、跟踪稳定等优点。可广泛应用于体积要求较高的场景。视频输入:可接收MIPICSI/LVDS/SubLVDS视频输入信号,预设I2C配置接口。视频输出:用GS2972芯片将BT.1120信号转换成SDI信号,支持SDI高清视频输出。应用场景:该产品可广泛应用于体积要求较高的场景,以及机载吊舱、车载辅助、边海防监控、森林防火、电站检测、智能周界等。慧视光电对RK3588跟踪板进行二次开发,实现AI智能应用。山东目标跟踪服务电话
目标跟踪
随着社会经济的发展,近年来汽车保有量持续上涨,同样的产生的汽车事故也越来越多。夜间行车的事故率要比白天高一半以上,因为夜晚行驶车辆时,光线不足、可视范围减少,会让驾驶人难以做出准确的判断,一旦有突发情况,驾驶人很难及时控制车辆,容易发生事故。针对这一情况,建议使用慧视光电的“慧眼”双光监测设备,可实现白天黑夜24小时监测车辆外界情况,利用红外线技术将黑暗变得如同白昼,使驾驶员在黑夜里看得更远更清楚,可及时识别外来车辆或则路面情况(积水识别、路面裂缝识别等),及时告警提示驾驶人员,提高驾驶安全性。网络目标跟踪慧视RK3399PRO图像处理板能实现24小时、无间隙信息化监控。

成都慧视光电技术有限公司的RK3588图像处理板同之前的RK3399pro图像处理板对比:CPU方面:3588CPU架构更先进,核心数8核(4大4小),rk3399pro只有6核(2大4小);NPU方面:rk3399pro算力3.0TOPS,rk3588算力6.0TOPS。(算力是NPU的一种评估方法,算力越高,检测帧率越高);视频输入输出接口方面:RK3399PRO支持2组MIPI-CSI输入,1组HDMI、1组MIPI-DSI输出RK3588支持1组HDMI、2组MIPI-CSI、1组DVP输入,2组HDMI、2组MIPI、1组BT1120输出;视频编解码器方面:rk3399pro支持H264,不支持H265,rk3588支持H264、H265,系统上:rk3399pro不支持RT实时系统,RK3588支持RT实时系统。
成都慧视光电技术有限公司研发的“慧眼”双光相机,采用平行双光路光学设计。产品可同时采集可见光和红外两路模拟视频数据,并基于采集到的实时视频流,实现目标锁定、目标跟踪功能。目标锁定与跟踪状态下,产品可在输出视频图像的同时,输出目标相对与产品光轴的实时视线角信息(方位、俯仰),可实现监视、预警、跟踪等信息处理。可应用于海防监控、边境监控、航道监控、海岛监控、港口码头、海事安全、渔政执法、海域动态监控、生态环境保护、反恐高空瞭望等远距离昼夜监控场合。RV1126图像处理板的目标识别能力突出。

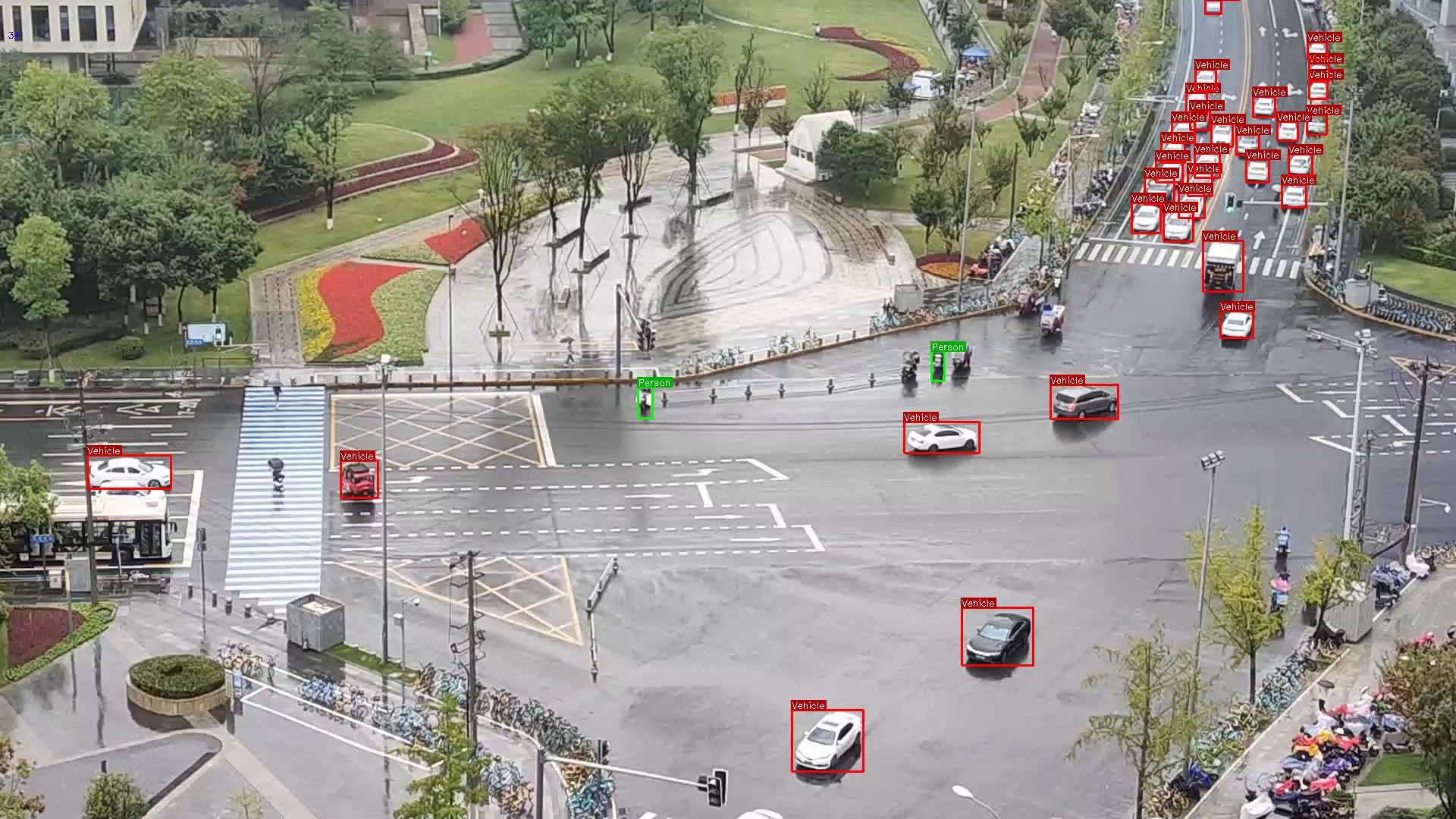
传统的监控系统需要依靠人对得到的监控视频进行分析,耗时耗力。智能监控系统可以通过目标跟踪、识别等技术自动实现对目标场景的分析和异常检测。随着深度学习在计算机视觉领域的快速发展,智能视频分析技术已经成为安防企业竞争的关键,相关技术已经达到非常高的精度。传统安防技术更多的是关注事后查证的有效性,但随着高清摄像机的普及,如何利用这些资源使设备“活”起来,已经成为越来越多安防企业发展的重点。有了视频分析,就可以及时发现视频中的异常情况,从而及时做出反应,减少损失。智能跟踪板在无人机的应用 。网络目标跟踪
慧视RV1126板卡可以用于大型公共停车场。山东目标跟踪服务电话
成都慧视光电技术有限公司的AM5708处理板是采用了创龙SOMTL5708处理板,内部植入其自主研发的智能图像算法,基于输入的可见光或者红外的视频流,可实时对目标进行锁定,同时可以根据输出目标的靶量信息,对目标进行实时跟踪。可支持二次开发,方便快速集成。并在此基础上成功研发视频跟踪板,可用于对视频中指定目标执行跟踪操作。通过将感兴趣目标在视频中的位置信息输入至视频跟踪板,跟踪板完成目标锁定后,持续输出目标在视频中的坐标信息,或者相对于相机光轴的脱靶量信息。产品特点:支持MIPICSI和CVBS两路视频输入,支持在用户选择的输入视频通道上执行目标跟踪。提供RS232/RS422控制通讯接口,用于输入控制指令和跟踪信息的输出。提供自适应点选功能,基于用户给定的目标位置点坐标,自适应对目标进行框选并执行跟踪。提供H.264压缩的视频以及HDMI接口的视频输出。视频输出支持OSD形式叠加跟踪结果。山东目标跟踪服务电话
与目标跟踪相关的文章

云南目标跟踪工程
- 辽宁流畅目标跟踪 2024-07-05
- 陕西比较好的目标跟踪 2024-07-04
- 江苏稳定目标跟踪 2024-07-04
- 宁夏高性能目标跟踪 2024-07-03
- 低压线目标跟踪市场报价 2024-07-03
- 附近目标跟踪产品 2024-07-02
- 信息化目标跟踪参考价格 2024-07-02
- 国产化目标跟踪 2024-07-02
- 新疆数据目标跟踪 2024-07-02
- 低压线目标跟踪有什么 2024-07-01
- 广西放心目标跟踪 2024-07-01
- 人防目标跟踪多少钱 2024-07-01
与目标跟踪相关的产品


与目标跟踪相关的新闻
-
四川国产化目标跟踪 2024-06-29 12:05:03目标检测与目标跟踪这两个任务有着密切的联系。针对目标跟踪任务,微软亚洲研究院提出了一种通过目标检测技术来解决的新视角,采用简洁、统一而高效的“目标检测+小样本学习”框架,在多个主流数据集上均取得了杰出性能。目标跟踪(Object tracking)与目标检测(Object detection)是计算...
-
湖南目标跟踪批发商 2024-06-29 04:06:48现在城市里面植被丰富,天气干燥时加上不少树林落叶、枯枝和枯草,在室外烧纸、点火或乱扔烟头,就会容易引起火灾。国家明令禁止在公共场所吸烟,因此除了法律的约束,更加便捷的手段应该予以应用来弥补人力监管的不足。在火星识别领域,慧视光电开发的RV1126图像处理板,凭借小巧精悍的性能,优异的识别能力,具有重...
-
附近目标跟踪应用 2024-06-28 09:11:34在无人机应用方面,目标跟踪技术可以作为无人机视觉处理模块,实现对需要拍摄的目标进行持续跟踪,使焦点始终保持在目标上,从而达到更好的拍摄效果。目前,基于深度学习的视觉跟踪技术已经成为无人机视觉跟踪中重要的技术组成部分。成都慧视光电技术有限公司运用自身的图像算法和硬件平台开发优势,推出了系列国产化图像检...
-
贵州目标跟踪批发商 2024-06-28 07:11:00视觉跟踪技术是计算机视觉领域(人工智能分支)的一个重要课题,有着重要的研究意义;且在导弹制导、视频监控、机器人视觉导航、人机交互、以及医疗诊断等许多方面有着广泛的应用前景。随着研究人员不断地深入研究,视觉目标跟踪在近十几年里有了突破性的进展,使得视觉跟踪算法不只是局限于传统的机器学习方法,更是结合了...
与目标跟踪相关的问题
新闻资讯
产品推荐
-

江苏稳定目标跟踪
2024-07-04 -
河南网络目标检测互惠互利
2024-07-04 -

广西人防目标检测设备
2024-07-04 -

安徽窄带多路高清视频压缩与传输专业方案
2024-07-04 -
什么目标检测产品
2024-07-04 -
西藏专业目标检测技术
2024-07-03 -

宁夏高性能目标跟踪
2024-07-03 -

河南算法定制AI智能供应商
2024-07-03 -

陕西AI智能服务商
2024-07-03