- 品牌
- 瑞必拓/高创
- 型号
- 齐全
- 额定功率
- 1.4kw,1.5kw
- 额定电压
- 110V,220V
- 额定电流
- 18.1A,20.6A
一体化直流无刷电机作为机电融合技术的集大成者,其重要价值在于通过高度集成的系统设计实现性能与可靠性的双重突破。该类电机将驱动控制器、传感器与电机本体深度整合,形成具备智能调速、精确定位和动态响应能力的闭环系统。相较于传统分体式结构,一体化设计消除了信号传输延迟与电磁干扰问题,通过内置霍尔传感器或无感算法实时监测转子位置,结合驱动器中的微处理器实现毫秒级换相控制。例如,在工业机器人关节驱动场景中,一体化电机可直接接收运动控制指令,在0.1秒内完成从静止到额定转速的加速,同时将位置误差控制在±0.01度以内。这种特性使其成为数控机床进给系统、半导体晶圆传送机械臂等高精度场景选择的动力源,综合节电率较异步电机方案提升35%以上。无刷直流电机凭借高效能特性,成为新能源汽车驱动系统的重要部件。福建36v直流无刷电机
市场应用层面,国产直流无刷电机已形成覆盖多领域的完整生态链。在新能源汽车领域,其作为驱动电机的重要部件,通过内置式永磁体(IPM)结构与高精度位置传感器,实现95%以上的能量转换效率,支撑车辆在-40℃至85℃极端环境下的稳定运行;在家电行业,变频空调、滚筒洗衣机等产品的普及推动电机需求激增,国产方案通过正弦波驱动技术将噪音降低至30分贝以下,同时通过再生制动功能实现15%的能耗节约;在医疗设备领域,其无火花、防爆特性使其成为人工心脏泵、高速离心机等精密仪器的关键动力模块,通过冗余设计确保连续运行寿命超过5万小时。随着智能制造与绿色能源政策的推进,国产直流无刷电机正加速向模块化、智能化方向演进,通过集成编码器、驱动器与通信接口,形成电机+控制+传感的一体化解决方案,进一步拓展在机器人关节、AGV小车等新兴场景的应用边界。南昌低速直流无刷电机电动自行车轮毂电机采用无刷直流技术,提升续航能力与爬坡性能。

转矩常数与反电动势常数是衡量直流无刷电机能量转换效率的重要参数。转矩常数(K_T)直接反映电机将电能转化为机械能的能力,其数值与定子绕组电流成正比。例如,当电机绕组电流为2A时,若转矩常数为0.5N·m/A,则电机可输出1N·m的转矩。这一参数在工业自动化设备中尤为重要,如传送带驱动系统需根据负载重量计算所需转矩常数,以确保电机在满载时仍能维持稳定运行。反电动势常数(K_E)则决定电机在恒定转速下的空载电压,其数值与绕组匝数、永磁体磁链强度正相关。例如,反电动势常数为0.1V/rpm的电机在转速为3000RPM时,空载电压可达300V。这一特性在电动车驱动系统中具有关键作用,当电机转速升高时,反电动势会限制电流输入,从而防止电机过载。
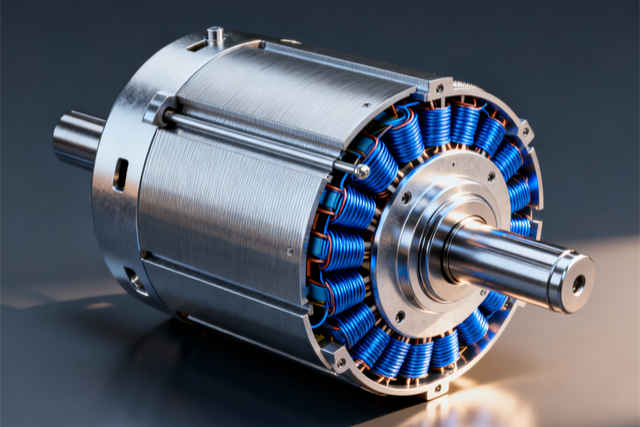
直流无刷电机的重要构造围绕定子、转子与位置传感器三大模块展开,其设计突破了传统有刷电机的机械换向局限。定子作为能量转换的基座,通常由硅钢片叠压成铁芯,表面开凿均匀分布的槽以容纳三相绕组。这些绕组多采用星形或三角形连接,通过绝缘导线绕制形成对称的电磁回路。当外部电源通过逆变器向绕组供电时,电流在铁芯中产生旋转磁场,其磁力线方向随通电顺序周期性变化。例如,在三相六拍控制模式下,每60°电角度切换一次绕组通电状态,使磁场方向呈阶梯式旋转。定子铁芯的硅钢片材料需具备低磁滞损耗特性,以减少能量在磁化与退磁过程中的损耗,同时叠片结构可抑制涡流效应,提升电机效率。工业机器人肩部关节采用无刷直流电机,提升上肢运动的覆盖范围。

转子部分则通过永磁体与导磁材料的组合实现磁场恒定输出。现代无刷电机普遍采用钕铁硼等稀土永磁材料,其剩磁强度可达1.2T以上,矫顽力超过900kA/m,确保在高速旋转中保持磁场稳定性。永磁体通常以表面贴装(SPM)或内嵌式(IPM)结构固定于转子铁芯,表面贴装式将磁瓦直接粘贴于铁芯外表面,适用于低转速、高扭矩场景;内嵌式则将磁体嵌入铁芯内部,通过导磁桥连接,可降低齿槽转矩波动,提升高速运行平稳性。转子铁芯多选用高导磁率的硅钢片,其作用是集中永磁体磁场并减少漏磁,同时与定子磁场形成高效耦合。当定子旋转磁场与转子永磁磁场相互作用时,根据电磁感应定律,转子会受到切向力矩作用而持续旋转,其转速与电源频率和极对数严格相关,满足同步电机特性。工业机器人腰部关节采用无刷直流电机,增强躯干旋转的灵活性。南宁直流无刷电机生产厂家
半导体晶圆传送机械臂通过无刷直流电机,实现微米级定位精度。福建36v直流无刷电机
位置检测与控制策略是三相直流无刷电机实现稳定运行的关键。有感控制方案采用霍尔传感器阵列,通常以120°或60°电角度间隔布置于定子槽间,通过检测转子磁极经过时产生的霍尔电压变化,输出三路正交信号。例如,当转子N极接近A相与B相绕组之间时,霍尔传感器H1输出高电平,控制器据此导通A相下桥臂与B相上桥臂的MOSFET,使电流从A相流入、B相流出,形成定向磁场。无感控制方案则通过反电动势过零检测实现换向,当转子旋转时,悬空相绕组会感应出与转速成正比的反电动势,其过零点对应转子磁极与定子绕组的相对位置。控制器通过比较三相反电动势的过零时刻,推算出转子电角度,进而生成六步换向时序。例如,在高速运行场景中,无感控制可省略传感器安装环节,降低成本并提升可靠性,但需解决低速时反电动势幅值过小导致的检测失效问题。两种方案的选择取决于应用场景对成本、精度与动态响应的权衡,共同支撑了三相直流无刷电机在工业自动化、消费电子等领域的普遍应用。福建36v直流无刷电机
- 青海大功率直流无刷电机厂家 2025-12-07
- 四川24v直流无刷电机 2025-12-07
- 常州直流无刷电机厂家 2025-12-06
- 陕西直流无刷电机多少钱一个 2025-12-05
- 武汉直流无刷电机多少钱一个 2025-12-05
- 低速直流无刷电机价位 2025-12-05
- 南昌直流无刷电机应用 2025-12-05
- 800w直流无刷电机售价 2025-12-04
- 广东直流无刷电机控制原理 2025-12-04
- 广西直流无刷电机的优势 2025-12-04
- 佛山750w直流无刷电机 2025-12-04
- 济南直流无刷电机供应商 2025-12-04