- 品牌
- 达宽科技,简控机器人,新蓝机器人
- 服务内容
- 软件开发,软件定制,技术开发
- 版本类型
- 普通版,增强版,标准版,测试版,单用户版
- 适用范围
- 企业用户
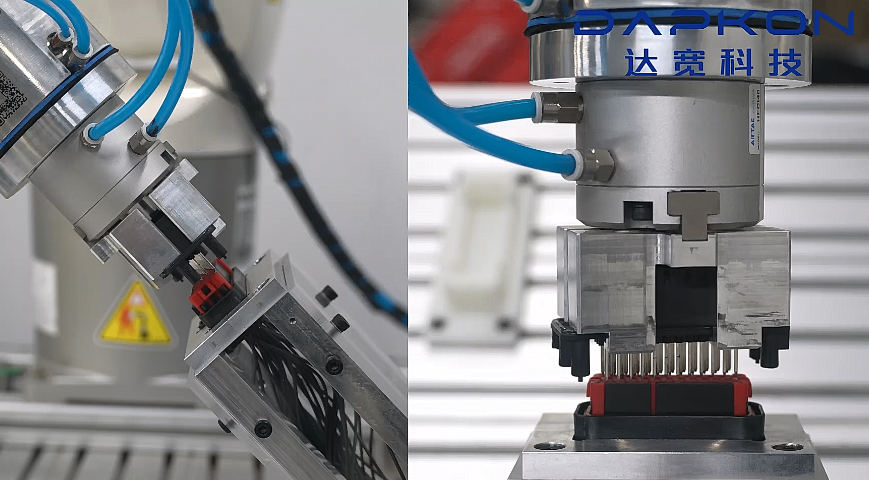
产品一致性是电机装配的要求,机器人力控在此发挥关键作用。传统装配中,机器人缺乏力觉反馈,易出现轴承压装过紧导致转动阻力增大,或过松造成运行晃动的问题,影响电机性能稳定性。达宽科技的机器人力控系统通过预设合理的力值区间,实时监测装配过程中的力觉变化。在轴承压装阶段,系统控制机器人输出均匀力度,确保压装深度与紧密度一致。这种稳定的力控能力让每台电机的装配质量保持均衡,降低因个体差异导致的后续检测返工情况。达宽科技机器人力控,让装配电池防爆阀工作更高效、更安全。安徽机器人力控检测

机器人力控确保电机装配质量稳定性
实现电机批量生产的一致性要求是制造业的关键课题。机器人力控技术为此构建了坚实基础。通过程序化设定的力控曲线和闭环反馈机制,确保每个装配动作施加的轴向压力保持稳定。达宽科技的机器人力控系统具备优异的力控制重复性。在转子动平衡校正、绕组端子压接等关键工序中,机器人力控能精确复现预设的装配力模式。这种稳定性有效降低了因压力波动导致的漆包线损伤或轴承预紧力偏差,保障了电机产品的运行可靠性和寿命周期。 江苏工业机器人力控装配达宽科技机器人力控设定动态扭矩阈值,异常工况触发柔性急停。
引入达宽科技的机器人力控方案进行行星齿轮装配,为制造企业带来多维度价值提升。机器人力控让机器人在精密装配中具备更高的适应性和稳定性,既能应对小批量多品种的柔性生产需求,又能保障大批量生产的质量均衡。通过减少调试时间提升生产效率,通过稳定质量控制降低成本损耗,通过安全机制减少意外损失。这种全流程的优化能力,让机器人力控成为推动行星齿轮装配工艺升级的重要支撑,助力企业在精密制造领域持续提升生产效能与市场竞争力。
装配过程的安全性对于保护精密齿轮和操作人员都极为重要。机器人力控技术为此构建了主动防护机制。系统持续监控装配过程中的力变化趋势,一旦侦测到异常阻力(如齿轮错齿、异物干涉或轴孔不对中),机器人力控系统会立即触发安全响应,限制输出力或停止运动,防止对齿轮、转轴或装配设备造成不可逆损伤。达宽科技的机器人力控方案内置了多级安全策略。生产现场反馈显示,这种基于实时力感知的防护功能,减少了贵重齿轮报废和设备意外停机的可能性,营造了更可控、更安心的自动化装配环境。达宽科技的机器人力控技术,使机器人能自适应不同曲面与材质,确保擦拭均匀有效。
在齿轮装配环节,传统人工操作常面临精度把控难、作业强度大等挑战。齿轮啮合间隙的细微偏差可能影响设备运行稳定性,而人工长时间作业易因疲劳导致装配质量波动,难以满足精密制造的需求。机器人力控技术的应用为解决这些问题提供了新路径。机器人力控通过内置传感器实时捕捉装配过程中的力值变化,让机器人在抓取、对位、啮合等环节灵活调整动作幅度与力度,精细适配不同型号齿轮的装配要求。达宽科技深耕机器人力控技术研发,结合齿轮装配的工艺特性,将机器人力控与自动化装备深度融合,帮助企业打破传统装配模式的局限,让机器人在齿轮装配任务中实现更稳定的操作表现。机器人力控装配电池防爆阀,优化流程,提升整体生产效率。新疆工业机器人力控调试
达宽科技机器人力控,助力电池防爆阀装配,节省成本与时间。安徽机器人力控检测
在生产效率提升方面,机器人力控展现出独特价值。传统电机装配中,操作人员需针对不同型号电机反复调试机器人程序参数,手动校准零件定位,不*占用大量准备时间,还难以适应多品种、小批量的柔性生产需求。达宽科技的机器人力控系统通过实时力反馈调节,让机器人具备自主适应能力。面对不同批次零件的细微尺寸差异,或装配过程中的轻微位置偏移,机器人力控能自动修正机器人的运动路径和施力大小,减少停机调试环节。装配流程从 “被动等待人工调整” 转为 “主动适应生产变化”,让生产线的连续运转更有保障,间接优化整体生产节奏。安徽机器人力控检测

- 云南协作机器人力控定制 2026-02-11
- 山东协作机器人力控搬运 2026-02-11
- 浙江协作机器人力控推荐 2026-02-11
- 江苏机器人力控打磨 2026-02-07
- 福建协作机器人力控设计 2026-01-29
- 吉林工业机器人力控方案 2026-01-28
- 西藏协作机器人力控使用方法 2026-01-28
- 黑龙江协作机器人力控装配 2026-01-27