- 品牌
- 达宽科技,简控机器人,新蓝机器人
- 型号
- DK
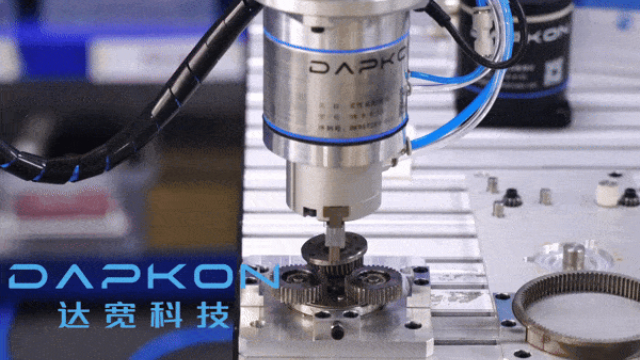
电机传动可靠性高度依赖齿轮啮合力矩的均衡性。人工装配易受操作经验差异影响,而达宽科技的力控装配通过数字化闭环控制,确保每套行星齿轮的压装深度与轴向压力稳定在工艺窗口内。在减速器制造中,系统严格限定轴承预紧力区间,避免过载导致的齿面磨损或预紧力不足引发的运行异响。装配过程生成的力-位移曲线报告为工艺优化提供量化依据,从源头提升产品可靠性。力控装配的重复精度优势减少了磨合期故障率,延长了齿轮箱使用寿命,同时降低返修成本,帮助企业实现质量均衡的规模化输出。
行星齿轮广泛应用于机器人关节驱动、汽车变速器等高效传动系统,其装配质量至关重要。传统机器人在行星齿轮装配时,常因既定程序限制,面对齿轮安装位置偏差或尺寸公差,易出现装配卡顿甚至零件损坏。达宽科技的力控装配方案打破这一困境。力控装配系统中的力传感器,如同赋予机器人敏锐 “触觉”。在行星齿轮装配过程中,传感器实时采集力反馈数据。当机器人操作行星齿轮安装,若遇力变化异常,如阻力过大,系统迅速响应,指导机器人灵活调整运动轨迹与施力,类似经验丰富工人凭手感操作,确保行星齿轮顺利完成装配,减少装配不当引发的问题,为行星齿轮装配流程带来新变革,使企业生产更顺畅高效。青海力控装配零部件达宽力控助力汽车线束装配连贯性,减少中断,保障装配流程顺畅。
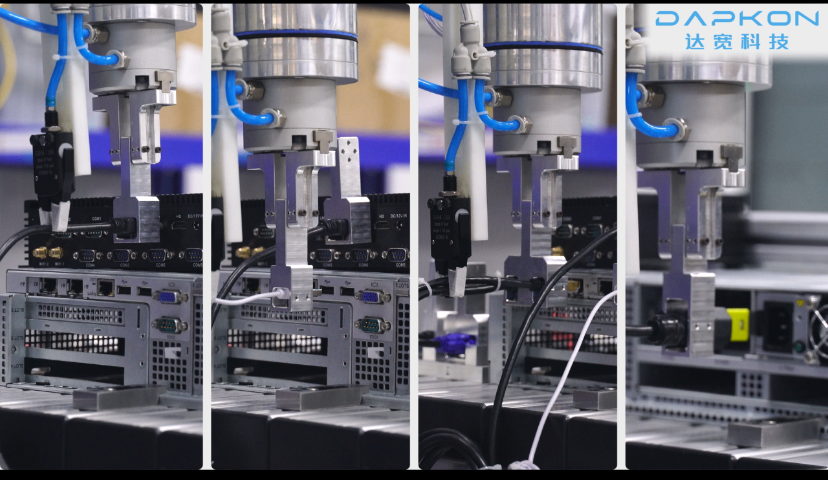
在现代工业生产中,轴孔装配是一项极为关键的工艺流程,其装配质量直接关乎产品的性能与使用寿命。达宽科技作为力控装配领域的佼佼者,致力于通过先进的力控技术,为制造业带来更高效、更精细的装配体验。机器人力控轴孔装配,借助高精度的力觉传感器与智能控制算法,能够在装配过程中实时感知力的变化,从而实现对装配力的精确控制。相较于传统的装配方式,力控装配能够有效避免因力过大而导致的零件损伤,同时减少因力不足而造成的装配不牢问题,提升了装配的成功率与稳定性。这种精细的力控能力,使得机器人在进行轴孔装配时,能够如同拥有“触觉”的工匠一般,细腻而精细地完成每一个装配动作,确保每一个产品都能达到一致的高质量标准。不仅如此,力控装配系统还可以根据不同的装配任务和产品特性,灵活调整装配参数,实现对各种复杂装配场景的高效应对,为企业的生产制造提供了更为灵活和多样化的解决方案。
行星齿轮装配的复杂性源于其多齿啮合结构与严苛的轴向对位要求。传统刚性机器人依赖高精度定位与定制化工装,面对零件公差或批次差异时需频繁停机调整,影响生产连续性。达宽科技的力控装配系统通过六维力传感器实时监测齿轮接触面的微观力变化,赋予机器人动态补偿能力。例如行星架与太阳轮嵌套过程中,系统依据阻力曲线自动优化压装轨迹,补偿位置偏差,无需人工干预即可完成平稳啮合310。这种自适应特性大幅降低了对精密夹具的依赖,企业更换齿轮型号时需调用预设力控参数库,省去机械重构时间,缩短换型周期。力控装配的柔性特点尤其适配多品种小批量生产模式,助力企业灵活响应定制化订单需求
达宽力控维持齿轮装配稳定节奏,保证生产不停顿,提升整体生产效率。
曲轴与轴套的装配常面临配合间隙微小的挑战,传统刚性机器人因无法应对零件公差与工装累积误差,易导致装配卡顿或工件损伤。达宽科技的力控装配系统通过高精度六维力传感器实时监测接触面微观力变化,动态调整机器人末端姿态。例如在曲轴嵌套过程中,系统依据阻力曲线自动优化压装轨迹,主动补偿位置与角度偏差,无需依赖超高精度定位工装即可完成平稳装配。这种“感知-响应”闭环大幅减少人工调试环节,产线换型时调用预设力控参数即可适配新规格曲轴,缩短设备重构时间,保障连续生产节奏。达宽科技的力控装配方案以柔性控制替代硬性定位,为精密轴孔装配提供了可靠的技术支撑。达宽力控系统维持生产稳定,机器人稳定作业,确保线束装配流程顺畅进行。吉林机器人自动化装配线束
力控装配让复杂线束装配有序,达宽力控助力机器人实现准确装配。山西力控装配接头
力控装配的价值不*在于任务执行,更在于为制造过程提供可追溯的力觉数据。达宽科技系统实时记录曲轴压装过程中的多维力信息。企业可通过分析历史力曲线定位薄弱环节,例如识别特定材质曲轴的摩擦系数偏差,针对性优化压装速度或润滑方案。在数字工厂环境中,这些数据可与MES系统交互,实现装配质量全程追溯,为工艺迭代提供依据。达宽科技的力控装配方案通过“生产-分析-优化”闭环,推动曲轴装配工艺持续成熟,为企业智能制造转型奠定工程基础。山西力控装配接头
- 云南柔性力控装配线 2026-02-06
- 辽宁机器人自动化装配接头 2026-02-06
- 辽宁工业机器人装配方案 2026-02-05
- 河北柔性力控装配线束 2026-02-05
- 陕西机器人力控装配线束 2026-02-05
- 新疆柔性力控装配电机 2026-02-05
- 中国香港柔性力控装配电机 2026-02-05
- 重庆柔性力控装配解决方案 2026-02-04