- 品牌
- 丰烨
- 型号
- 升降横移、平面移动、垂直升降、简易升降、垂直循环
该结构便于防坠挂钩30摆动安装于安装底座10,而且结构容易制作与装配,整体结构紧凑。具体地,固定板70在由安装底座10起的高度与自锁连杆40的长度相当,在自锁连杆40处于自锁位40a时,自锁连杆40的轴线方向与固定板70的高度方向相互平行,而输出杆21与防坠挂钩30的长度方向相互平行,结构紧凑。在本实用新型另一实施例中,防坠挂钩30与固定板70之间通过第三销轴63枢接,让防坠挂钩30摆动安装于固定板70。在本实用新型另一实施例中,输出杆21沿竖直方向延伸设置。该结构便于布置控制电机20、自锁连杆40与防坠挂钩30,让整体结构紧凑,占用空间较小。在本实用新型另一实施例中,还包括用于固定于升降轿厢200的限位开关81,输出杆21的一端安装有用于触发限位开关81的限位碰块82。在限位碰块82碰撞于限位开关81时,确认输出杆21到位,自锁连杆40处于自锁位40a或可移动位40b的极限位置,实现对输出杆21的行程精确控制,进而对防坠挂钩30的位置精确控制。结合采用控制电机20驱动输出杆21的精确位移,双重行程保护设置提高了平层防坠装置100安全性,保证了汽车和设备的安全性。在本实用新型另一实施例中,限位开关81的数量至少为二,限位开关81间隔设置。以闸门杆的垂直端为起点,出口方向接地线圈占2/3,入口方向接地线圈比为例。南京立体升降停车设备

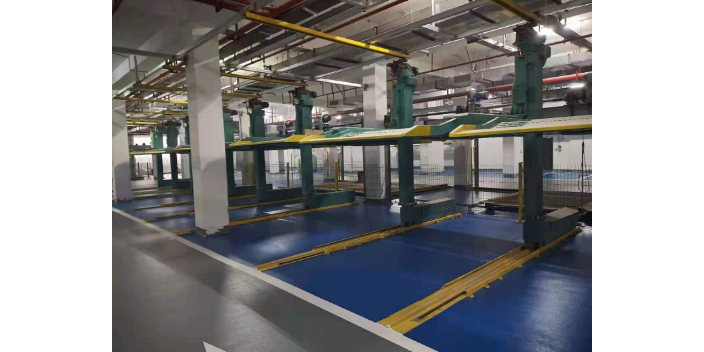
油缸4固定连接在底板21的操作面且油缸4的伸缩端与链条5对应,油缸4采用顶升油缸4,设备通过油缸4对链条5进行顶升,链条5顶升带动滑台1上下升降,此油缸4顶升链条5的技术为现有公知技术,在此不做赘述,滑台1的操作面通过螺栓与上车台3固定连接。上车台3由边梁31和波浪板32组成,边梁31与滑台1通过螺栓固定连接,边梁31的左右两侧均向地面倾斜,边梁31的中空部分通过多个波浪板32进行填充,边梁31配合波浪板32在相同载重量的情况下重量更轻,大量减少设备的整体重量,在进行维修和安装时更为方便,上车台3的左右两侧呈一定倾斜角度,方便汽车从上车台3的两侧驶入上车台3。锁紧装置的数量为多个,多个锁紧装置均匀固定连接在支撑柱22上,锁紧装置为现有公知技术,在此不做赘述,汽车驶入上车台3后油缸4启动使滑台1提升,将汽车提起后通过锁紧装置将滑台1的位置进行锁定,防止滑台1坠落。支撑柱22的高度为3296厘米,上车台3的尺寸为长度为4262厘米、宽度2620厘米,该尺寸根据停车的需要进行紧密计算,保证使用性和稳定性的同时很大程度的减少了设备的重量和占地面积,安装维护方便。无锡多层升降横移立体停车设备报价随着道闸停车设备系统的出现,一切都发生了改变。

不会触发检测信号,扭簧为限位撞针提供复位的趋势力,钢丝绳一旦松弛,抵紧限位撞针的力不在存在,限位撞针在扭簧的作用力下复位,角度发生变化,即触发了检测信号,及时控制升降传动机构停止。进一步地,所述角度a为60°~90°,在该角度范围内,后吊点防松检测装置的检测为灵敏。进一步地,所述的前吊点防松检测装置包括支座一、摆臂、滚轮、支座二和限位开关;所述支座一和支座二相邻设置在移动框架顶面;所述摆臂一端和支座一铰接,另一端转动式连接有滚轮;所述滚轮置于连接前吊点的钢丝绳上;所述限位开关固定连接在支座二上,所述限位开关的触发端位于摆臂下落的路径上。滚轮置于钢丝绳上,通过滚轮使摆臂保持静止状态,在载车板升降时,滚轮与钢丝绳之间为滚动摩擦,不至于增大摩擦力而影响寿命,只要钢丝绳保持张紧状态,摆臂的运动状态就不会发生变化,当钢丝绳松弛后,钢丝绳不再支撑滚轮,也就不再保持摆臂的位置状态,摆臂在重力作用下一端下落,由于限位开关的触发端位于摆臂下落的路径上,因此摆臂下落必然会触碰到触发端,从而触发信号控制升降传动机构及时停止进一步地,所述后吊点防松检测装置和前吊点防松检测装置各为两个。
显然,所描述的实施例只是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。请参阅图1-5,本实用新型提出了一种单侧立柱简易停车设备,包括立柱2、滑台1、上车台3、油缸4、锁紧装置、链条5和保护装置6,立柱2由底板21和支撑柱22组成,底板21呈矩形体,底板21的四角通过膨胀螺丝固定在地面,底板21的左右两侧分别与一个支撑柱22固定连接,支撑柱22通过膨胀螺丝固定在墙面,通过膨胀螺丝将立柱2固定在墙面和地面,利用地面和墙面的强度来增加设备的稳定性,使设备能承载极高的重量。两个支撑柱22对应的一面分别固定连接有导轨7,滑台1左右两侧的顶端和底端分别活动连接有导向轮8,四个导向轮8分别与两个导轨7活动连接,导向轮8在滑台1上有着进行转动的功能,滑台1通过导向轮8在两个支撑柱22之间有着上下滑动的功能,导轨7对导向轮8进行限位,使滑动的运转更为稳定,滑台1的两侧固定连接有连接板9,两个连接板9分别与两个支撑柱22远离的一面贴合。链条5与滑台1固定连接,链条5远离滑台1的一端与底板21固定连接。停车秩序不佳,停放管理不严,加剧了"停车难"的情况。

自动驻车系统(AUTOHOLD)是一种汽车运行中可以实现自动手刹的技术应用。这项技术使驾驶者在车辆停下时不需要长时间刹车,以及在启动自动电子驻车制动的情况下,能够避免车辆不必要的滑行。中文名自动驻车系统外文名Automaticparkingsystem作用刹车优点自动目录1简要介绍2工作原理3系统功能4技术优势自动驻车系统简要介绍简单讲,自动驻车功能技术的作用就是使车辆不会溜后,特别适用于自动驻车系统图示上下坡以及频繁起步停车时。自动驻车系统与电子手刹(EPB:ElectricalParkBrake,学名:电控机械式驻车制动器)能够共同构成一套智能的刹车控制系统,从而将行车过程中的临时性制动和停车后的长时性制动功能整合在一起,并且由电子控制方式实现停车制动。电子手刹是由电子控制方式实现停车制动的技术。其工作原理与机械式手刹相同,均是通过刹车盘与刹车片产生的摩擦力来达到控制停车制动,只不过控制方式从之前的机械式手刹拉杆变成了电子按钮。在功能上将刹车控制系统从基本的驻车功能延伸到自动驻车功能。[1]自动驻车系统工作原理自动驻车系统功能的实现,并不是简单使用电子手刹来完成的。人们在上下坡或者红绿灯前停车时,会使用手刹来驻车,此时如果单纯使用电子手刹。从原来的取卡式到现在的车牌识别。新疆升降横移类停车设备维保
当然我们在用之前肯定还是要先去了解的。南京立体升降停车设备
本实施例的检测装置不会受到光线等环境因素的影响,机械式的检测方法来检测位置变化更加准确,本实施例的后吊点防松检测装置6中设有讯号模块,向plc输出限位撞针60的角度变化讯息,限位撞针60先是抵紧在连接后吊点的钢丝绳上,只要后吊点的钢丝绳一直保持张紧状态,限位撞针60的抵紧状态不会改变,不会触发检测信号,扭簧62为限位撞针60提供复位的趋势力,钢丝绳一旦松弛,抵紧限位撞针60的力不在存在,限位撞针60在扭簧62的作用力下复位,角度发生变化,即触发了检测信号,及时控制升降传动机构3停止。实施例3本实施例的松动自检立体停车设备,在实施例2的基础上做进一步改进,所述角度a为60°~90°。在该角度范围内,后吊点防松检测装置6的检测为灵敏。实施例4如图5和图6所示,本实施例的松动自检立体停车设备,在实施例1~3的基础上做进一步改进,所述的前吊点防松检测装置7包括支座一70、摆臂71、滚轮72、支座二73和限位开关74;所述支座一70和支座二73相邻设置在移动框架2顶面;所述摆臂71一端和支座一70铰接,另一端转动式连接有滚轮72;所述滚轮72置于连接前吊点的钢丝绳上;所述限位开关74固定连接在支座二73上,所述限位开关74的触发端位于摆臂71下落的路径上。南京立体升降停车设备


- 新疆无避让升降横移停车设备生产厂家 2024-12-10
- 杭州两立柱简易升降停车设备维保 2024-12-06
- 上海地坑升降停车设备价格多少 2024-12-06
- 温州升降式地下立体停车设备 2024-12-05
- 自动升降横移停车设备报价 2024-12-05
- 立体停车设备 2024-12-04
- 无锡家用升降停车设备维保 2024-12-04
- 新疆垂直升降立体停车设备哪家好 2024-12-04