HSR-JR612 是一款高性能通用小负载关节机器人,依托华中数控多年伺服控制的技术积累,使用自主研发的控制技术及高性能伺服电机,实现同级别机器人中的大臂展及大负载。 采用高刚性手臂、先进伺服,运动速度快,重复定位精度高达±0.06mm、运动半径1555mm。 充分适用于打磨、搬运、焊接等行业。产品特点:一、高性能 1:精密的机械加工工序管控,严格的装配管控;2:国外先进测量标定设备进行轨迹精度测试,严格精度把关;3:进口品牌高精度减速机,匹配高性能伺服电机,保证机器人平稳的启动与停止;4:高性能控制系统,使机器人可快速、准确地运行;5:负载高达12Kg;6:臂展高达1555mm;7:出厂前稳定性测试长达7*24小时以上,保证质量的稳定;协作机器人可以节省结构空间,同时简化传动结构;内部结构紧凑,实现了机器人一站式关节解决方案。上海6轴机器人上下料
现在制约机器人普及的因素不仅*是价格和技术,很多国内的生产车间太狭窄、太拥挤,并不适合生产线的布局安装。如果要完全实现自动化,企业除了支付购置机器人的高昂资金,还需要对厂房进行改造甚至重建,这在无形中提高了“机器换人”的门槛。针对这一情况,华数机器人研发了HSR-BR6双旋机器人。事实上,华数机器人的集成商客户联合终端用户提出,需要一种价格较低、能够高速运作、体积轻巧,并且能适应生产车间中钻工中心的狭小空间作业的六轴机器人,对机器人的运动范围也提出要求。北京6轴机器人装配高加速性能:采用低速比高精度减速机,拥有超快的加速性能。

我国3C 行业始终保持着较高的景气度,市场容量逐步开拓。 3C行业其产品包含外壳、玻璃、盖板在内的零部件制造技术以及整机装配技术,其加工工艺简单,重复度高,且人工成本也在逐年攀升,未来 3C 行业的发展将会向创新和优化逐渐倾斜,推行智能化生产势在必行。HSR-JR605 是一款小型多用途机器人,结构紧凑、体积小、重量轻、关节速度高、动态响应快,荷重 5kg ,具有低投资、高产出优势。满足快速拾放,具有极大的灵活性。在保持六轴机器人的通用性情况下其结构紧凑,重复定位精度高,响应快。 该机型可高效完成上下料、分拣、装配、打磨以及其他加工应用的工作任务。
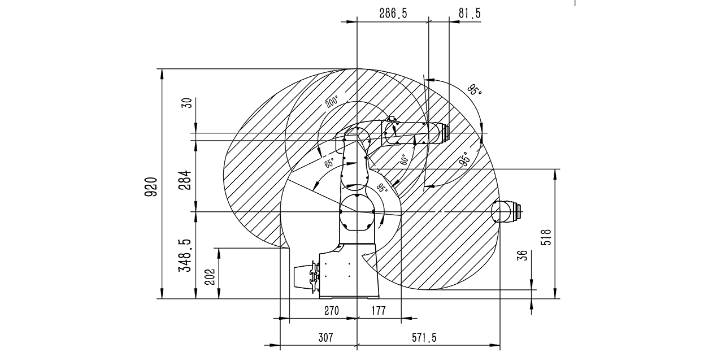
HSR-JR603/JR605是一款小型多用途机器人,JR603工作半径571.5mm,JR606工作半径746mm,产品特点:1.运转速度快。范围动作,一个循环在8s以内。2.重复定位精度高。重复定位精度达到±0.02mm,可适用于高精度作业。3.成本低廉。主要零部件自主生产,有效控制成本。4.轻量化。整机重量控制在55kg以内,搬运安装方便。5.小型化。占地空间小,适合于空间狭小的场合。目前,HSR-JR603/JR605小型多用途机器人已经应用于涂胶、搬运、分拣、装 配等多个领域场合。机器人流水线生产线通过视觉定位,实现高精度、强适应性,同时,调机方便、稳定性高。

HSR-BR612PCB**机器人:R-BR612多功能6轴工业机器人主要针对钻工中心上下料、3C行业冲床上下料、可由6轴变为四轴水平多关节机器人,是提供一种可变模式关节机器人,用于克服传统的六轴机器人在狭小空间点位搬运作业速度不高、手臂不能内旋转、小臂前端重量偏重导致能耗偏高、造价高等问题,实现生产效率进一步提升,实现六轴机器人更快速普及,推出更高防尘防水等级更高的机器人,以应对不同的客户,特为特定行业做出的一款定制机型。机器人重复定位精度一般在0.05mm左右; 搬运、上下料等人工示教的应用需考虑重复定位精度。北京6轴机器人装配
工业机器人内部软限位,通过限位开关,可限制机械手和定位轴的轴范围,软件限位开关用作工业机器人防护。上海6轴机器人上下料
HSR-BR612PCB行业机器人:HSR-BR612 多功能4轴6轴工业机器人主要针对钻工中心上下料、3C行业冲床上下料、支持变为四轴水平多关节机器人,是提供一种可变模式关节机器人,用于克服传统的六轴机器人在狭小空间点位搬运作业速度不高、手臂不能内旋转、小臂前端重量偏重导致能耗偏高、造价高等问题,实现生产效率进一步提升,实现六轴机器人更快速普及,推出更高防尘防水等级更高的机器人,以应对不同的客户,特为特定行业做出定制机型。上海6轴机器人上下料
深圳市旗众智能科技有限公司致力于机械及行业设备,是一家生产型的公司。公司业务涵盖视觉点胶系统,点胶软件,点胶控制系统,辅料贴附系统等,价格合理,品质有保证。公司将不断增强企业重点竞争力,努力学习行业知识,遵守行业规范,植根于机械及行业设备行业的发展。旗众智能秉承“客户为尊、服务为荣、创意为先、技术为实”的经营理念,全力打造公司的重点竞争力。