北斗全球定位系统在海洋牧场无人船的定位导航中发挥中心作用,结合惯性测量单元构成的多源组合导航模块,可提供高精度的位置、航速、航向等导航信息。在海上作业环境中,北斗系统具备抗干扰能力强、定位精度高的特点,能够有效克服传统导航方式受天气、地形影响的局限。通过实时获取的定位数据,海洋牧场无人船可精细遵循预设航线航行,确保作业区域的准确性;同时,定位数据与作业数据绑定存储,为后续的作业溯源与数据分析提供空间坐标支撑,提升海洋牧场管理的精细化水平。它的出现,标志着海洋牧场管理迈入了智能化、无人化的新时代——小豚智能无人船。直销海洋牧场无人船
海洋牧场无人船在设备投放作业中展现出高效的作业能力,可搭载水下机器人、监测浮标等设备抵达指定作业区域完成精细投放。作业前,操作人员通过系统规划投放路线与投放点坐标,无人船借助高精度定位系统抵达目标区域后,通过机械臂或主用投放装置将设备平稳放入海中。投放过程中,船舶的稳定控制系统可抵消海况扰动,确保设备投放的准确性;水下摄像头实时回传投放画面,便于操作人员确认投放效果。这种作业模式避免了人工投放过程中设备碰撞、投放偏差等问题,提升了设备投放的效率与安全性,为海洋牧场的信息化建设提供设备部署支撑。无人船海洋牧场无人船平台小豚智能车间综合运用于无人船设备、硬件设施的开发和规模化生产,整合公司内的技术研发资源。

海洋牧场无人船的标准化建设是推动其规模化应用的重要基础,相关技术规程对无人船的设计、性能、作业流程等方面制定了统一要求。从船舶尺度、动力系统到感知设备、作业能力,均有明确的技术指标,确保不同厂家生产的无人船具备互通性与兼容性。标准化的作业流程规范了无人船的操作步骤,降低了不同操作人员之间的操作差异,提升了作业质量的稳定性。同时,标准化的测试与认证体系保障了海洋牧场无人船的产品质量,增强了养殖者对设备的信任度,为其在全国范围内的推广应用创造了条件。
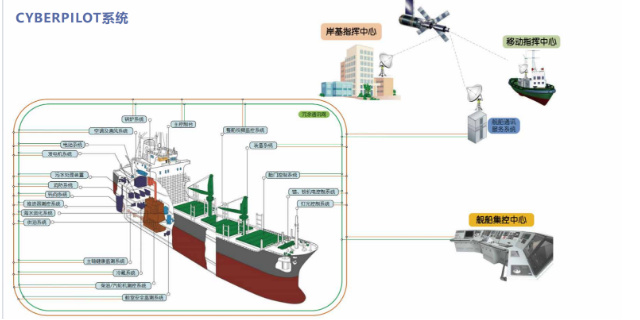
远程控制技术是海洋牧场无人船实现异地操控的关键支撑,其通过构建稳定的数据链路,实现岸端与船舶之间的实时指令传输与数据交互。岸端控制站的操作人员可通过交互软件查看无人船的航行状态、作业数据及周边环境影像,根据实际需求下达航行调整、作业启停等指令。远程控制模式下,船舶的油门挡位、转向操作等均由岸端远程操控,同时支持船上方向盘推杆操控作为备用模式,确保极端情况下作业的连续性。这种远程操控模式大幅降低了操作人员的海上作业风险,尤其适用于深远海海洋牧场的远距离作业场景。小豚智能亮相BEYOND国际科技创新博览会。
海洋牧场无人船并非孤立运行,而是通过物联网技术与其他设备形成协同作业网络。它可与水下机器人联动,前者负责水面巡航与数据汇总,后者深入水下监测网箱状态、鱼类活动情况,两者数据相互补充,构建起立体监测体系。在投喂作业中,无人船能与岸边饲料储备系统实时通信,根据养殖密度和鱼类生长阶段自动计算所需饲料量,由岸上设备精细配送至无人船,再由其完成投喂,减少中间环节的损耗。此外,它还能配合气象监测站获取实时风力、浪高数据,动态调整巡航速度与路线,确保作业安全。这种多设备协同模式,让海洋牧场的管理形成闭环,提升了整体运营效率。通过小豚智能的自主导航技术,无人船能够自动规划航线,优化海洋牧场的资源分配。北京海洋牧场无人船是什么
船舶智能化改造传统有人驾驶开发升级改造成无人船。直销海洋牧场无人船
海洋牧场无人船的声学监测技术为海洋生物研究提供了全新的视角,通过搭载多波束高分辨成像声呐,可对网箱水域进行立体扫描,获取鱼群密度分布、活动轨迹、单体尺寸等详细信息。声学监测技术具备穿透性强、不受光照条件影响的优势,可在浑浊海水或夜间环境下正常工作,弥补了光学监测的局限性。通过对声学数据的长期积累与分析,可深入了解海洋生物的生长规律、行为习性,为养殖品种的优化选择、养殖密度的科学调控提供依据,推动海洋牧场养殖技术的升级。直销海洋牧场无人船







