在海洋牧场养殖作业中,无人船的应用明显提升了生产效率和自动化水平。例如,通过预设航线,无人船可定时、定点完成饲料投喂任务,避免人工投喂的不均匀问题。同时,无人船配备的智能控制系统能够根据鱼类活动情况调整投喂量,减少饲料浪费。此外,无人船还可用于网箱巡检,通过高清摄像头识别网衣破损或鱼类异常行为,及时预警潜在风险。小豚智能的海洋牧场无人船支持多船协同作业,通过集群控制技术实现更大范围的覆盖,为规模化养殖提供了可靠的技术支持。这种自动化模式正在逐步改变传统海洋养殖的劳动密集型特点。小豚智能已形成河豚、江豚、海豚系列无人船平台;小豚动力、小豚智控和小豚智讯等功能部件。浙江海洋牧场无人船机械结构

海洋牧场无人船在日常作业中积累了大量的海洋环境数据,这些数据正在催生新的管理模式。通过部署多艘无人船组网监测,可以构建海洋牧场的数字孪生系统,实现养殖环境的可视化管理和智能预警。小豚智能开发的云端数据分析平台,能够对无人船采集的水质、气象等参数进行深度挖掘,为养殖密度调控、投喂策略优化提供科学依据。这种数据驱动的精细化管理方式,正在帮助养殖企业从经验型向智能型转变,提升整体运营效益的同时,也为海洋大数据应用开辟了新途径。 大连国产海洋牧场无人船东莞小豚智能技术有限公司是工研院全自主无人艇省创新团队成立的产业化公司。

编队控制技术的应用,使多艘海洋牧场无人船可协同完成复杂作业任务,提升整体作业效率。通过通信系统构建的编队网络,各船舶可实现位置信息共享、作业指令同步,根据预设的作业规划完成分区作业、接力作业等协同模式。例如在大规模海洋牧场的投饵作业中,多艘无人船可按预设航线分区投喂,避免作业重叠与遗漏;环境监测任务中,编队船舶可实现监测区域的全覆盖扫描,缩短监测周期。编队控制技术需解决多船之间的避碰协调、指令同步等中心问题,依赖高精度定位与高效通信技术的支撑,是海洋牧场无人船规模化应用的重要技术方向。
海洋牧场无人船的动力系统设计需兼顾作业续航与环境适应性,通常采用燃油或电力作为动力源,部分高级机型可实现油电混合驱动。电力驱动模式具有噪音低、污染小的优势,适用于近岸生态敏感型海洋牧场作业;燃油驱动则具备续航里程长、动力强劲的特点,更适合深远海长时间作业。动力系统需为船舶航行提供稳定的推进力,同时为感知设备、监测仪器、通信系统等提供持续的电力支持。其设计需充分考虑海洋环境的特殊性,具备良好的防水、防腐蚀性能,以适应高湿度、高盐雾的海上作业环境,保障设备长期稳定运行。无人船喷水推进器叶轮通过联轴器与驱动轴相连,水流从喷口高速喷出,在反作用力的作用下,船体前进。

海洋牧场无人船的应用推动了养殖成本结构的优化,通过替代人工降低了长期运营成本。传统海洋牧场作业需要大量人工投入,包括海上作业人员、设备维护人员等,人工成本占比高且受人员流动性影响大。海洋牧场无人船可实现单船替代多名人工完成投饵、监测等作业,大幅减少人工需求;同时,其标准化的作业模式降低了人为操作失误造成的损失,提升了资源利用效率。虽然初期设备投入较高,但长期来看,通过降低人工成本、提升作业效率,可实现养殖成本的整体下降,提升海洋牧场的经济效益。公司致力于研发无人系统共性技术。浙江海洋牧场无人船机械结构
小豚车间坐落于松山湖(深城投)智能装备产业园,车间总施工面积1519.05平方米。浙江海洋牧场无人船机械结构
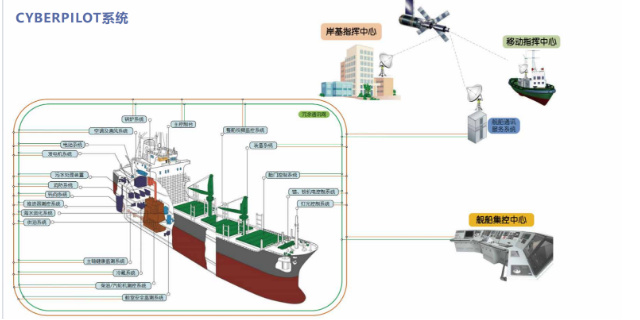
海洋牧场无人船作为智慧渔业的重要装备,其中心系统由感知、决策、控制三大模块构成,各模块协同运作保障作业的有序开展。感知系统集成雷达、激光雷达、数字照相机及北斗全球定位系统模块等设备,可精细捕捉自身位置、航速、航向等导航信息,同时对周边船舶、浮冰、漂浮物等障碍物进行多方面探测。决策系统基于感知数据完成目标检测与跟踪,结合预设作业需求生成比较好航行路线,并具备实时更新路径以实现避碰的能力。控制系统则承担手动与自动模式切换、油门挡位调节、液压转向控制等功能,支持远程遥控与自主航行两种中心操作模式,为海洋牧场各类作业提供稳定的操控支撑。浙江海洋牧场无人船机械结构